STM32F407硬件I2C Slave
·
MCU:STM32F407ZET6
IDE:STM32CubeIDE
HAL库
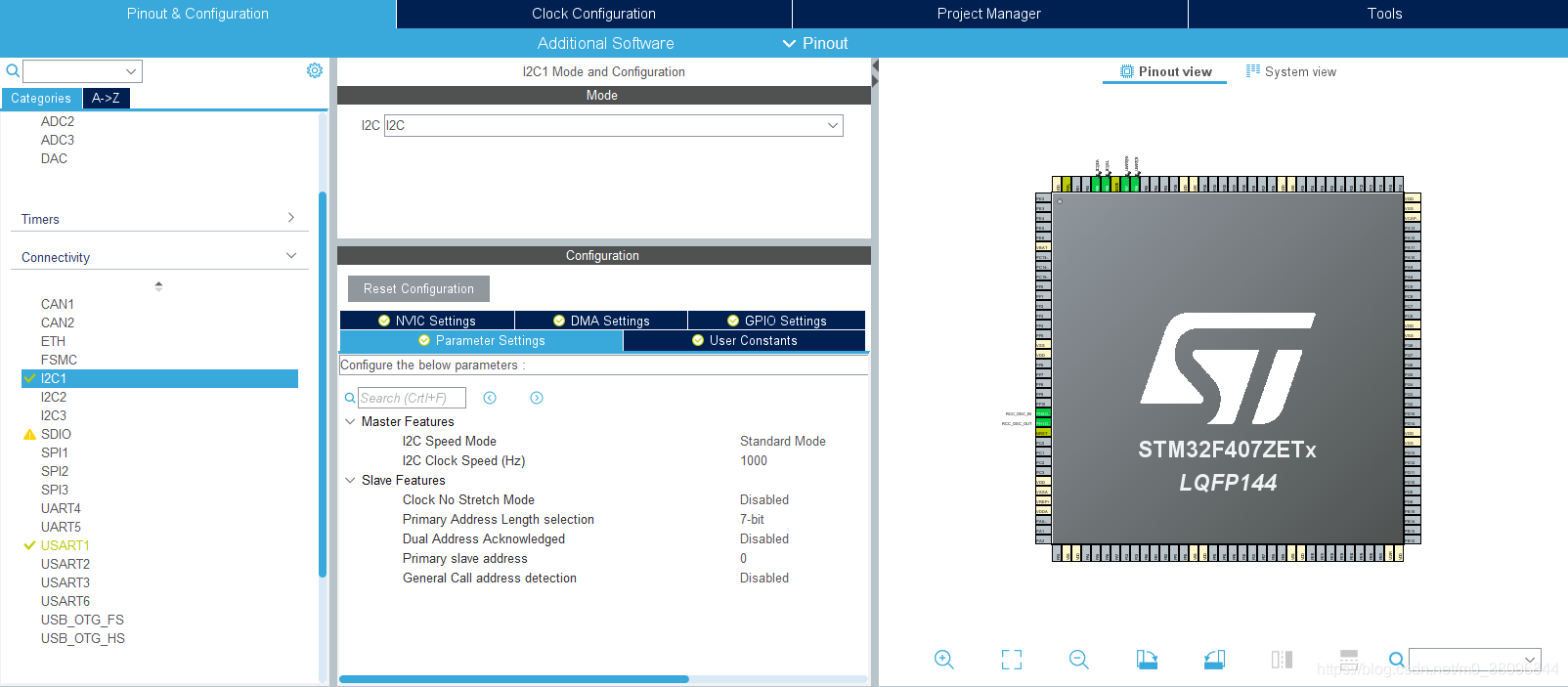
硬件I2C当作Slave,模拟EEPROM行为
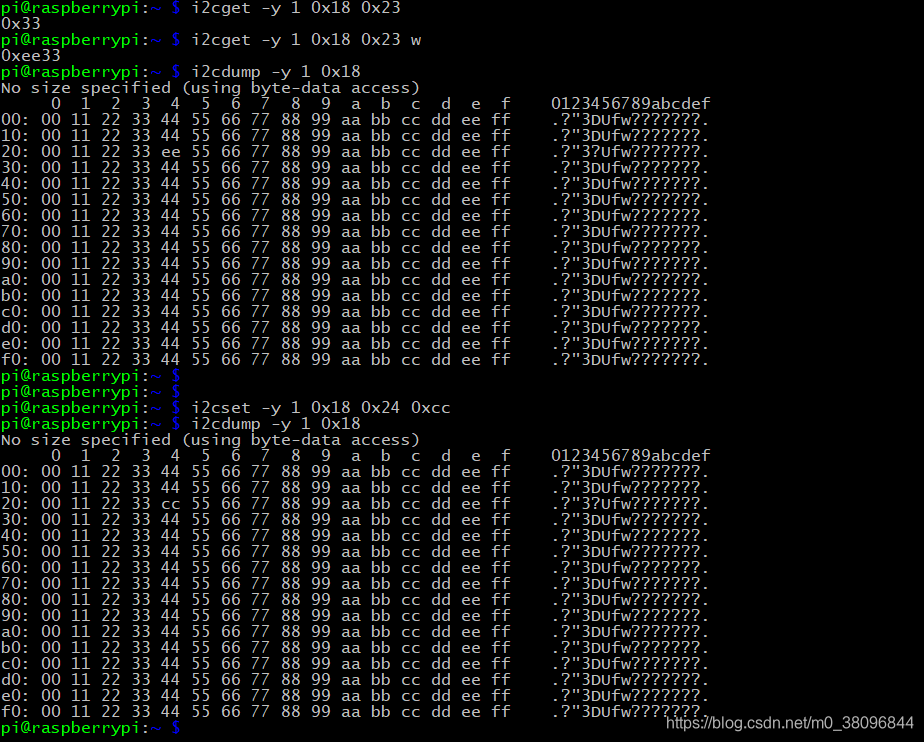
测试工具:树莓派为I2C主机,使用I2C-tools进行测试
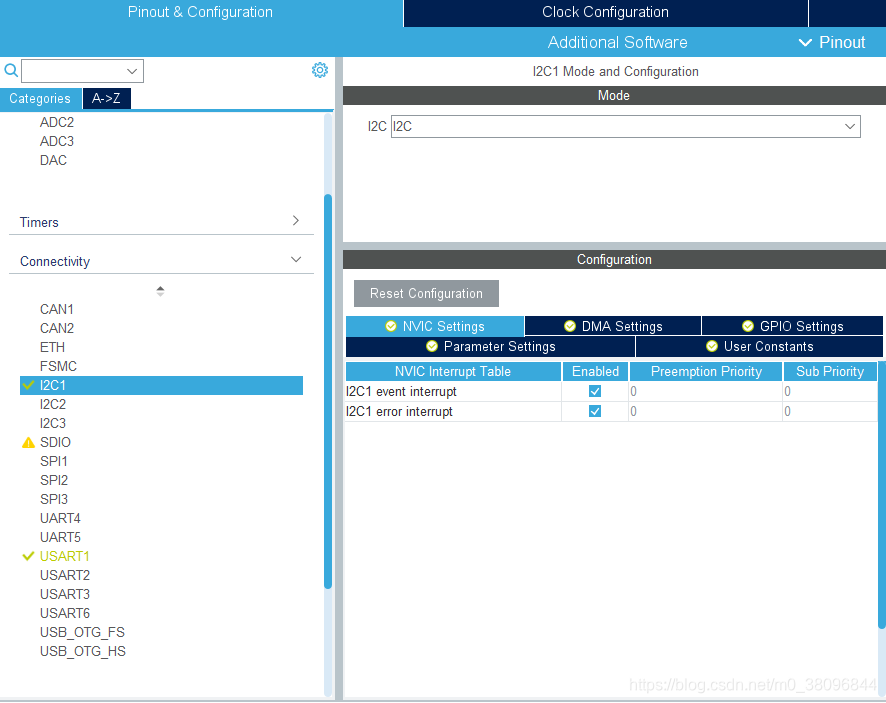
配置I2C为Slave,从机地址直接在代码中修改,开启中断
以下为main.c中的程序
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
I2C_HandleTypeDef hi2c1;
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
/* USER CODE END PFP */
/* USER CODE BEGIN 4 */
/*retargets the C library printf function to the USART*/
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1,(uint8_t*)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
uint8_t r_flag = 0,t_flag = 0;
uint8_t flag_0 = 0;
uint8_t flag_1 = 0;
uint8_t flag_2 = 0;
uint8_t flag_3 = 0;
uint8_t flag_4 = 0;
uint8_t flag_5 = 0;
uint16_t rx_len = 0;
uint16_t tx_len = 0;
uint8_t RX_Buffer[256];
uint8_t rx_buff[10] = {0x00};
uint8_t tx_buff[260] =
{
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,0xAA,0xBB,0xCC,0xDD,0xEE,0xFF,
};
void HAL_I2C_AddrCallback(I2C_HandleTypeDef *hi2c, uint8_t TransferDirection, uint16_t AddrMatchCode)
{
__HAL_I2C_CLEAR_FLAG(hi2c, I2C_FLAG_ADDR);
if(TransferDirection == I2C_DIRECTION_RECEIVE) //需要发送
{
flag_0++;
tx_len = 0;
rx_len = 0;
t_flag = 1; //置发送标志
r_flag = 0; //清楚读标志
HAL_I2C_Slave_Seq_Transmit_IT(&hi2c1, (tx_buff + rx_buff[0]), 1, I2C_FIRST_FRAME);
// HAL_I2C_Slave_Transmit_IT(&hi2c1, (tx_buff + rx_buff[0]), 1); //该函数发送会使总线死掉
}
else if(TransferDirection == I2C_DIRECTION_TRANSMIT)//需要接收
{
flag_1++;
t_flag = 0; //清除发送标志
r_flag = 1; //置读标志
HAL_I2C_Slave_Seq_Receive_IT(&hi2c1, rx_buff, 1, I2C_FIRST_AND_NEXT_FRAME);
// HAL_I2C_Slave_Receive_IT(&hi2c1, rx_buff, 1); //该函数接受会使总线死掉
}
else
{}
}
void HAL_I2C_ListenCpltCallback(I2C_HandleTypeDef *hi2c) //监听中断回调
{
flag_2++;
HAL_I2C_EnableListen_IT(hi2c); // Restart
}
void HAL_I2C_SlaveTxCpltCallback(I2C_HandleTypeDef *hi2c) //全部发送完成回调
{
flag_3++;
tx_len++;
HAL_I2C_Slave_Seq_Transmit_IT(&hi2c1, (tx_buff + rx_buff[0] + tx_len), 1, I2C_FIRST_FRAME); //模拟eeprom被读一个字的行为
}
void HAL_I2C_SlaveRxCpltCallback(I2C_HandleTypeDef *hi2c) //全部接收完成回调
{
flag_4++;
RX_Buffer[rx_len] = rx_buff[0];
rx_len++; //接收字节长度
#if 1
if( (r_flag==1) && (rx_len==2) ) //模拟EEPROM下设寄存器值功能
{
rx_len = 0;
tx_buff[RX_Buffer[0]] = RX_Buffer[1];
memset(RX_Buffer,0,2);
}
#endif
HAL_I2C_Slave_Seq_Receive_IT(&hi2c1, rx_buff, 1, I2C_FIRST_AND_NEXT_FRAME);
}
void HAL_I2C_ErrorCallback(I2C_HandleTypeDef *hi2c)
{
flag_5++;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint16_t i,j;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_I2C_EnableListen_IT(&hi2c1);
HAL_I2C_Slave_Seq_Receive_IT(&hi2c1, rx_buff, 1, I2C_LAST_FRAME); //开启从机中断接收
printf("start i2c test!\n\r");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
#if 1
if (flag_0 > 0)
{
printf("T:%d\n\r",flag_0);
flag_0 = 0;
}
if(flag_1 > 0)
{
printf("R:%d\n\r",flag_1);
flag_1 = 0;
}
if(flag_2 > 0)
{
printf("lc:%d\n\r",flag_2);
flag_2 = 0;
}
if(flag_3 > 0)
{
printf("tc:%d\n\r",flag_3);
flag_3 = 0;
}
if(flag_4 > 0)
{
printf("rc:%d\n\r",flag_4);
flag_4 = 0;
}
if(flag_5 > 0)
{
printf("er:%d\n\r",flag_5);
flag_5 = 0;
}
#endif
if(rx_len > 0)
{
#if 0
HAL_Delay(2000);
for(i=0;i<rx_len;i++)
{
printf("%x ",RX_Buffer[i]);
}
printf("\n\r");
#endif
memset(RX_Buffer,0,rx_len);
rx_len = 0;
}
HAL_Delay(4000);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 12;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV16;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV8;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
/** Enables the Clock Security System
*/
HAL_RCC_EnableCSS();
}
/**
* @brief I2C1 Initialization Function
* @param None
* @retval None
*/
static void MX_I2C1_Init(void)
{
/* USER CODE BEGIN I2C1_Init 0 */
/* USER CODE END I2C1_Init 0 */
/* USER CODE BEGIN I2C1_Init 1 */
/* USER CODE END I2C1_Init 1 */
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 1000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0x30;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C1_Init 2 */
/* USER CODE END I2C1_Init 2 */
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_MultiProcessor_Init(&huart1, 0, UART_WAKEUPMETHOD_IDLELINE) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
}
测试效果:
问题:
HAL_I2C_Slave_Transmit_IT 和HAL_I2C_Slave_Receive_IT不能用在连续的接收和发送,可以通过对比seq的看到他们的区别!

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 10
10 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)