【机器人学】机器人运动学基础
四元数在机器人中的应用欧拉角欧拉角的奇异性欧拉角万向节死锁四元数欧拉角欧拉角的奇异性欧拉角的奇异性实际上就是在从旋转矩阵逆解旋转角度过程中,由于三角函数的性质导致出现退化解的现象,详细见《机器人学建模、规划与控制》西西里安诺 P36其中需要注意公式 (2.23)第二个式子符号有误。欧拉角万向节死锁例子正在研究中。四元数理论部分的解释见豆瓣. 其中的链接用safari或谷歌打开比较快。电子书谷歌可以
文章目录
DH table
DH参数可以说是机器人学中最最基础的部分,SDH和MDH虽说殊途同归,但是在阅读一些论文的时候却发现有时候作者不直接指明是那种DH这样对论文的阅读和仿真就会带来一些问题,虽说MDH相较于SDH有很多优点,但是目前发现仍有很多论文在对串联机器人分析时使用SDH。
在这里直接指出机器人学的两大神书:
- 《机器人学导论》使用的时MDH,但是书中没有说明自己使用的就是MDH。
- 《机器人动力学与控制》使用的是SDH并且对MDH做出了说明,实属点赞👍。
参考
- 《机器人动力学与控制》 霍伟
- 《机器人学导论》John J. Craig
MDH
目前国内大多数用的都是修改DH,一般来说也比较熟悉,这里直接给出截图。
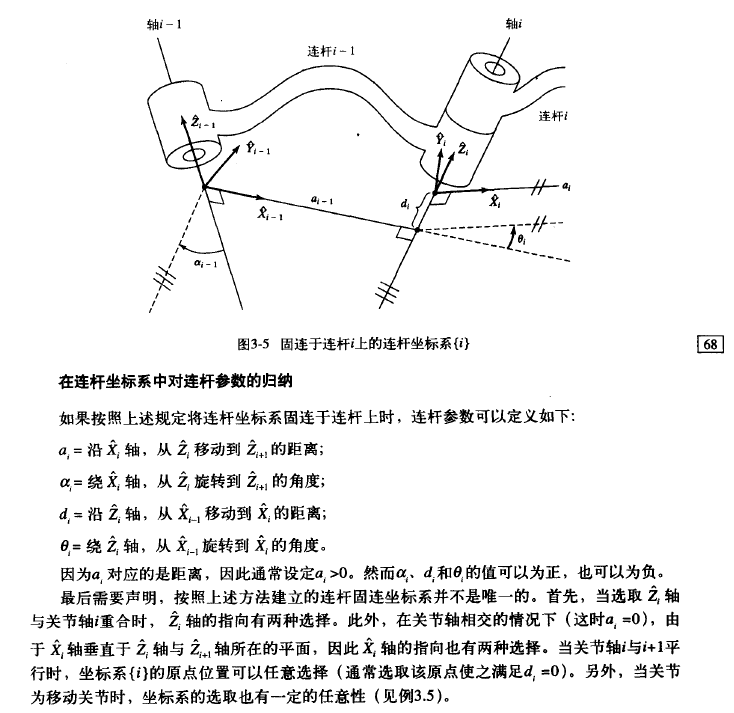
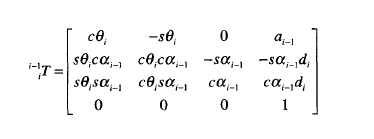
修改DH对应的齐次方程一般表达式:
SDH
标准DH虽说有一定缺陷,但是在国外的一些论文中仍然十分常见。
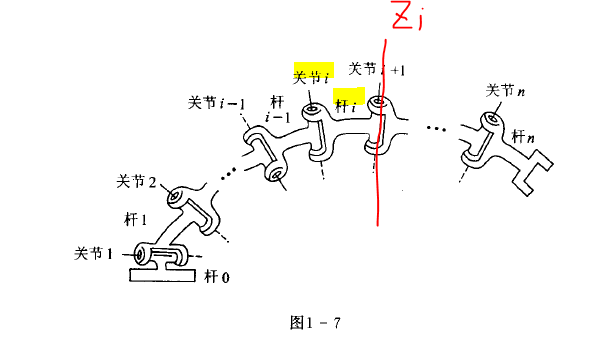
首先看一下杆和关节的规定:(这里sdh和mdh都一样当)
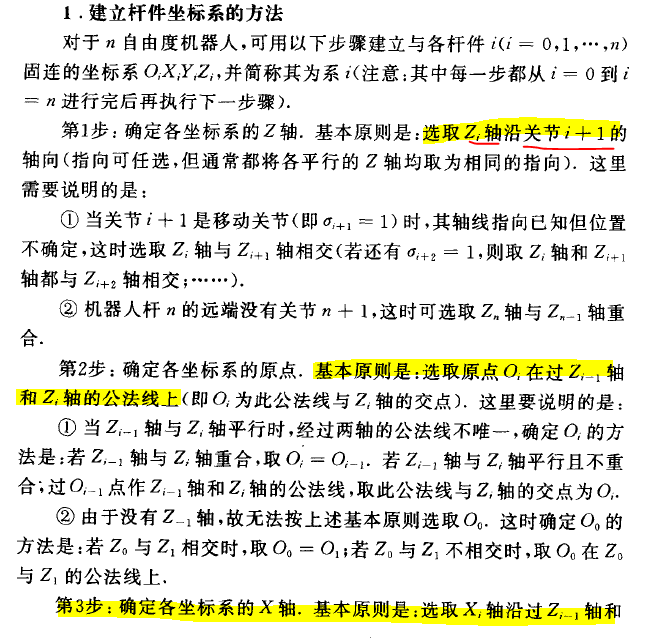
再看坐标系的建立方法:
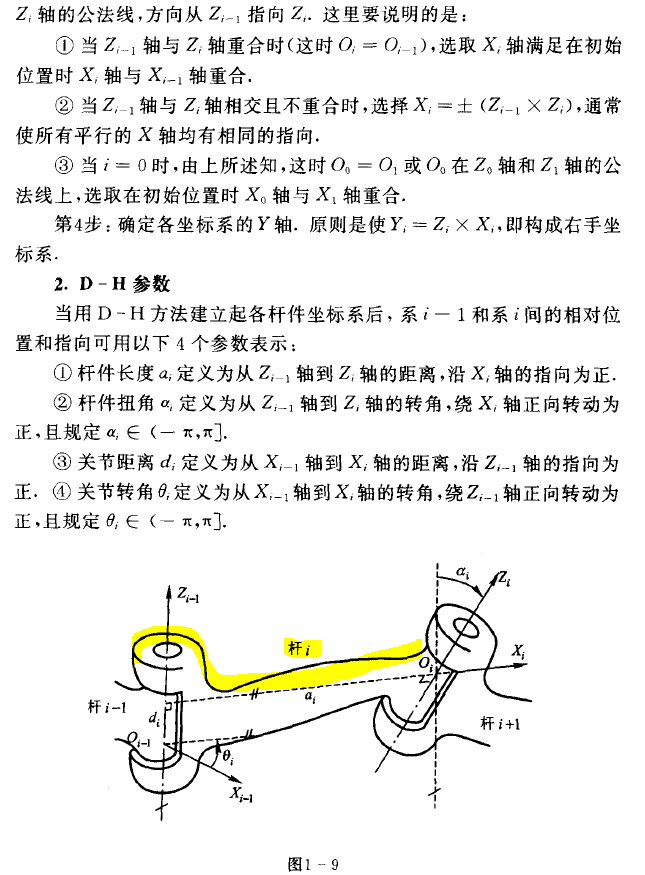
其齐次变换矩阵为:
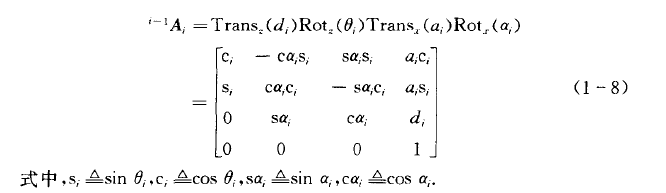
用例子更好的理解标准dh:
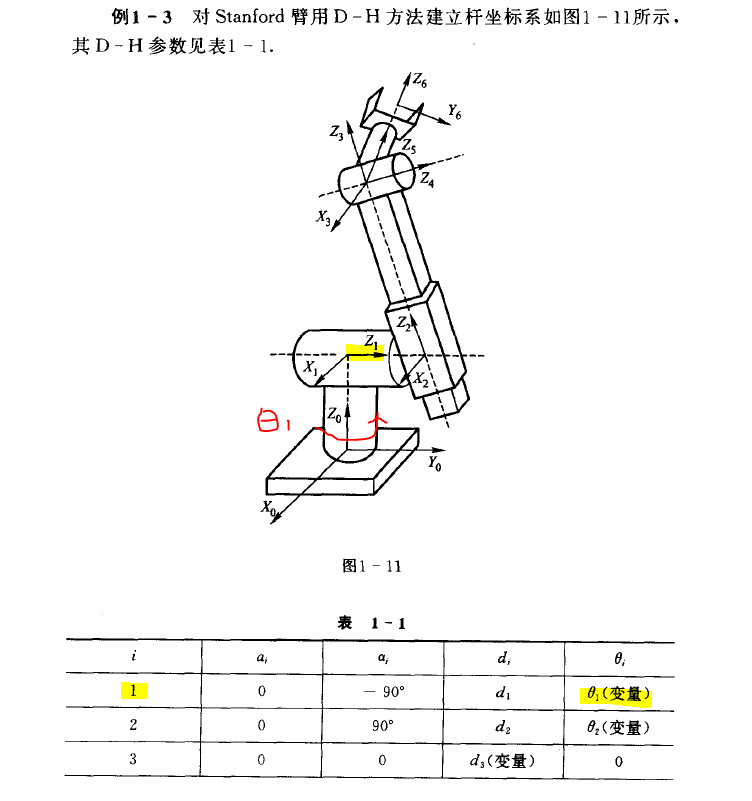
在论文验证及仿真过程中要搞清楚是哪一种dh。
齐次变换矩阵
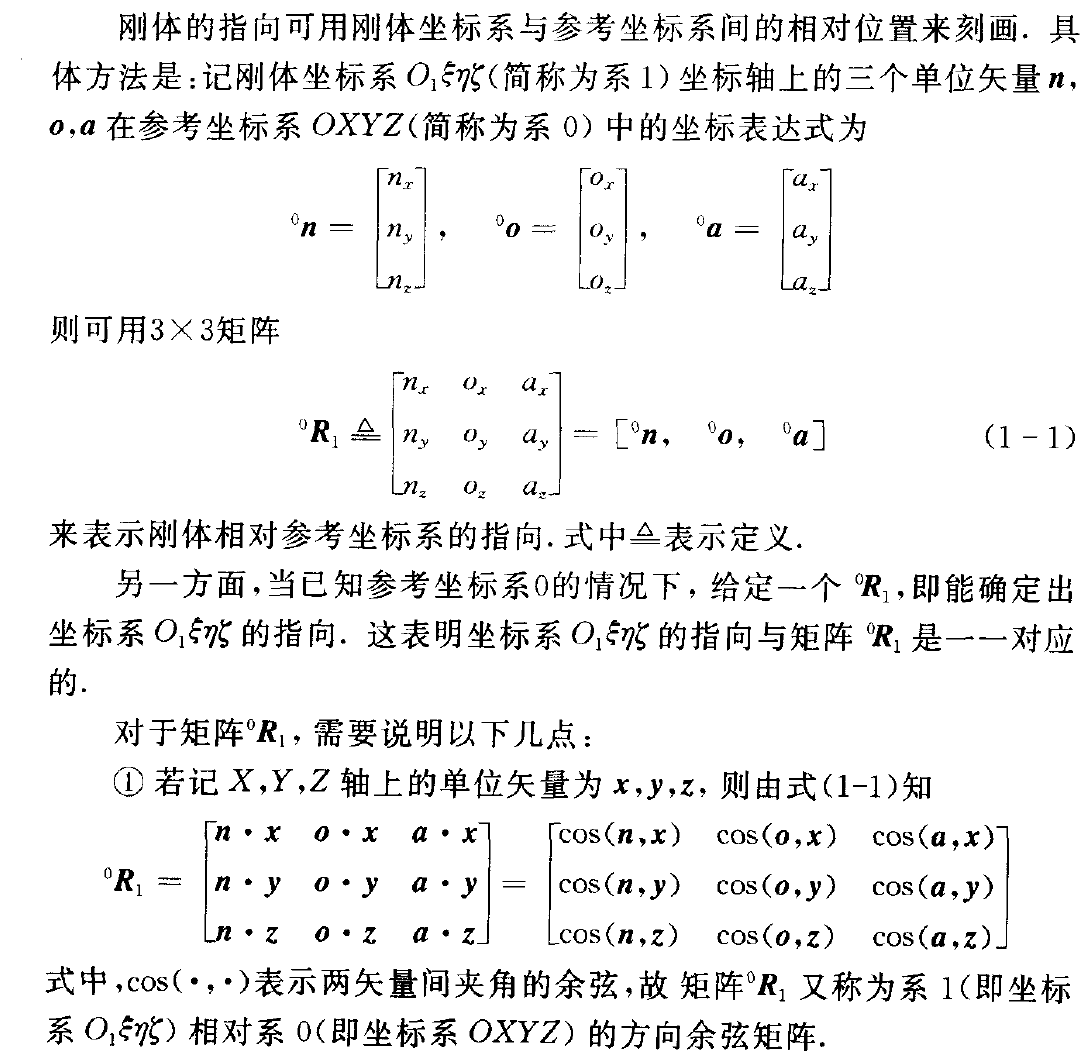
结合例子就更好理解:
rotz(45)=
0.7071 -0.7071 0
0.7071 0.7071 0
0 0 1.0000
rotz(90) =
0 -1 0
1 0 0
0 0 1
其中投影就是在其上的坐标。
左乘、右乘
很多人搞不清矩阵左乘、右乘对旋转的影响。而且很多博客给出的都是错误的结论,鱼龙混杂。
在这直接给出仿真结果:
设有R_world=E(世界坐标系)和R_my(在世界坐标系下的 描述),蓝线是Z轴,红线是X轴,绿线是Y轴。
- 左乘:R_my=rotx(t)*R_my
可以看出R_my坐标系先对于自己的x轴发生旋转(并且是顺时针,这是因为R_my相对于rotx(t)旋转了,rotx(t)是逆时针旋转)。
- 右乘:R_my=R_my*rotx(t)
可以看出R_my坐标系先对于R_world的x轴发生旋转。
左右乘与DH参数
欧拉角
这里一般就指常用的RPY角度
欧拉角的奇异性
欧拉角的奇异性实际上就是在从旋转矩阵逆解旋转角度过程中,由于三角函数的性质导致出现退化解的现象,详细见:
《机器人学建模、规划与控制》西西里安诺 P36
其中需要注意公式 (2.23)第二个式子符号有误。
欧拉角万向节死锁
例子正在研究中。
四元数
理论部分的解释见Quaternions for Computer Graphics. 其中的链接用safari或谷歌打开比较快。
齐次变换矩阵、欧拉角、轴角和四元数之间的转化关系
在机器人控制中,由于不同机器人之间的接口不甚相同,因此常常需要将他们之间进行相互转换。
matlab在实践过程中总是有问题,但是eigen完全没问题,所以这里用eigen:
- Eigen中四元数、欧拉角、旋转矩阵、旋转向量之间的转换
- Eigen Main Page
- 坐标变换学习笔记—代码篇Eigen,看一下其中算法具体的实现方式。
- Eigen子矩阵操作
机器人pieper准则
很好理解->《机器人动力学与控制》霍伟著

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 9
9 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)