无迹卡尔曼滤波算法_无迹卡尔曼滤波(UKF)代码实战
一、本文简介使用之前文章(参考3)中的数据,但是对非线性函数使用了无迹卡尔曼(UKF)来滤波。二、环境语言:julia 1.5第三方包:DataFrames, CSV, LinearAlgebra, Plots, PyPlot, StatsBase, Distributions三、参考多传感器数据融合及其应用-杨万海-西安电子科技大学出版社机器人学中的状态估计-高翔等译-西安交通大学出版社小市民:
·
一、本文简介
使用之前文章(参考3)中的数据,但是对非线性函数使用了无迹卡尔曼(UKF)来滤波。
二、环境
- 语言:julia 1.5
- 第三方包:DataFrames, CSV, LinearAlgebra, Plots, PyPlot, StatsBase, Distributions
三、参考
- 多传感器数据融合及其应用-杨万海-西安电子科技大学出版社
- 机器人学中的状态估计-高翔等译-西安交通大学出版社
- 小市民:扩展卡尔曼滤波(EKF)代码实战
四、理论
此部分主要源于参考2 P103-105 中关于 sigmapoint卡尔曼滤波部分,其中依据P100中的描述,参数
注:原问题是运动方程是线性,观测方程是非线性的,由于UKF在校正环节需要计算状态向量X和观测向量Y的协方差,因此将线性化的运动方程也进行了无迹变换。尚未搜到这种情况下的其余处理算法。
五、代码
#=
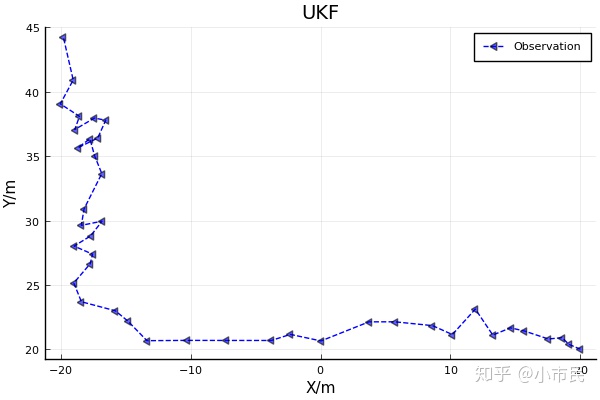
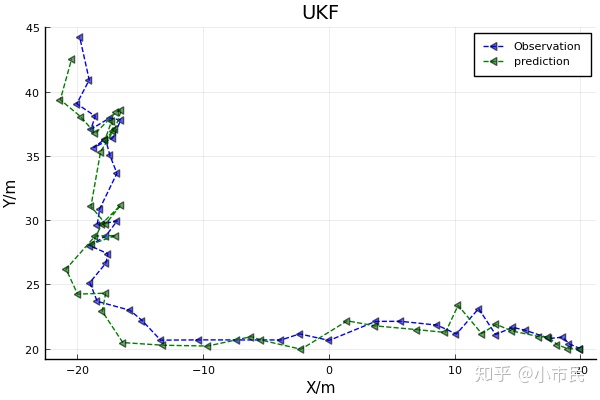
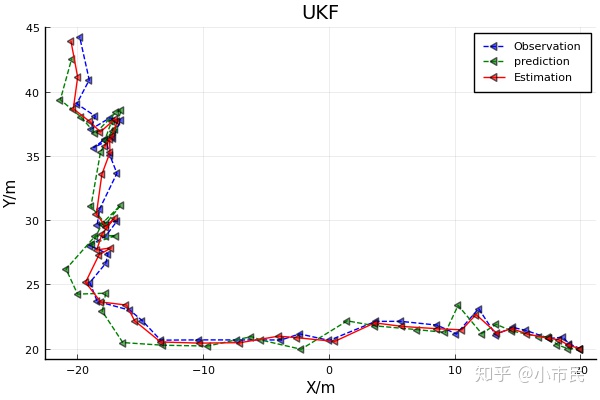
六、结果
七、EKF和UKF的预测值和估计值对比
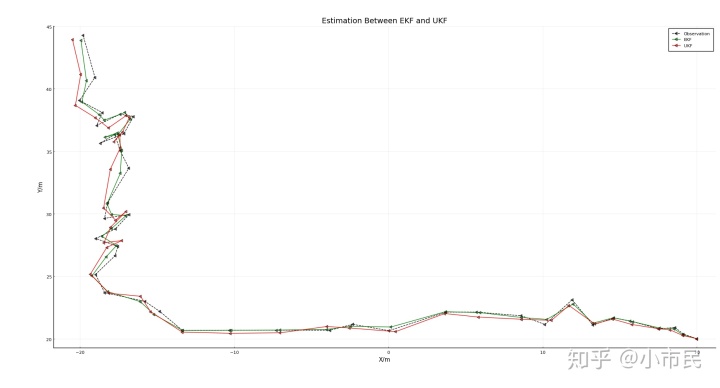
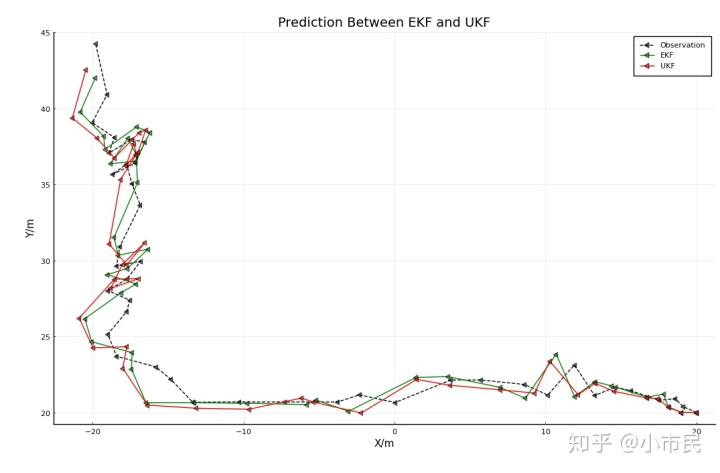
由图中可看出,差距并不是非常大

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)