三维叉乘怎么算_最适合深度学习的三维旋转表示
3D计算机视觉,图形学,机器人学的研究经常涉及三维旋转的估计 。这里分享一篇CVPR19的论文“On the Continuity of Rotation Representations in Neural Networks”。这篇文章分析比较了旋转矩阵,欧拉角,四元数等常见三维旋转表示对神经网络训练的影响,并提出了一种适合深度学习的三维旋转表示方法。不连续(Continiuous)的旋转表示..
3D计算机视觉,图形学,机器人学的研究经常涉及三维旋转的估计 。这里分享一篇CVPR19的论文“On the Continuity of Rotation Representations in Neural Networks”。这篇文章分析比较了旋转矩阵,欧拉角,四元数等常见三维旋转表示对神经网络训练的影响,并提出了一种适合深度学习的
不连续(Continiuous)的旋转表示不是好的旋转表示
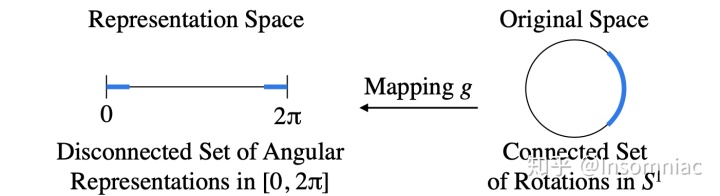
文章提供了简单的2D旋转的例子:某旋转矩阵
三维旋转表示的连续性的定义
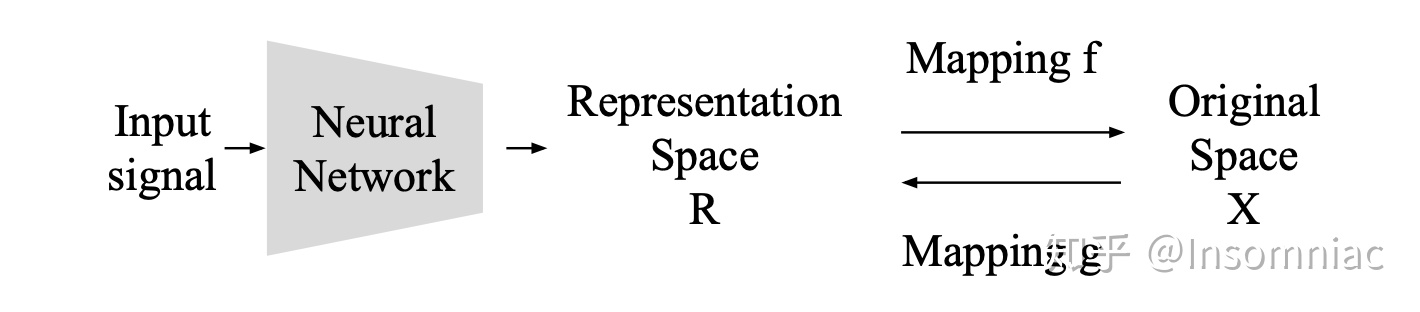
假设在深度学习中,某一神经网络学得某一表征空间
连续的
这里的
所以文章提出的
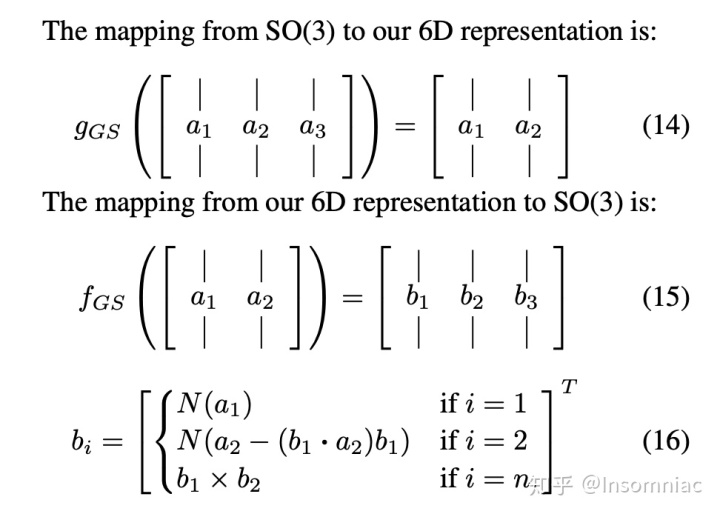
对于这种旋转表示,
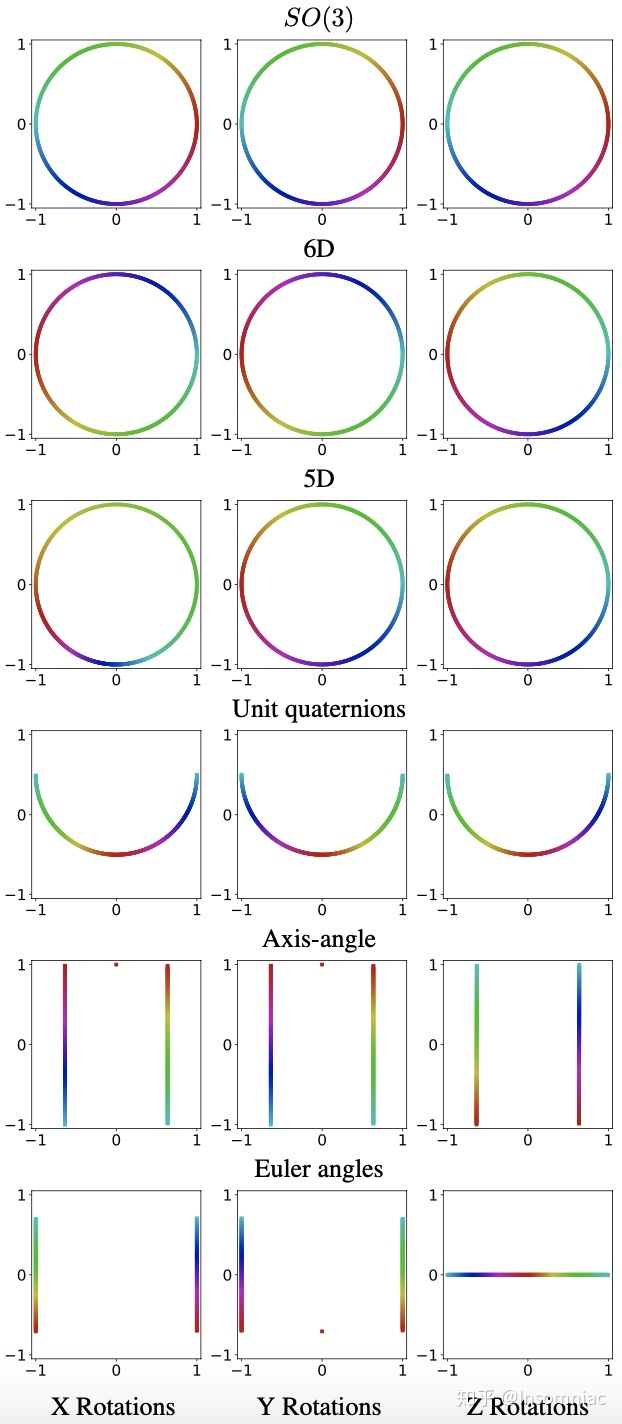
实验结果
5D和6D是文章所提出的新的连续的旋转表示。
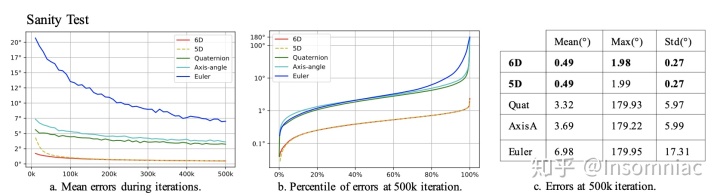
Sanity Test 就是一个简单的Reconstruction任务,训练一个神经网络自动编码器(Autoencoder)来把旋转矩阵编码为某种表示
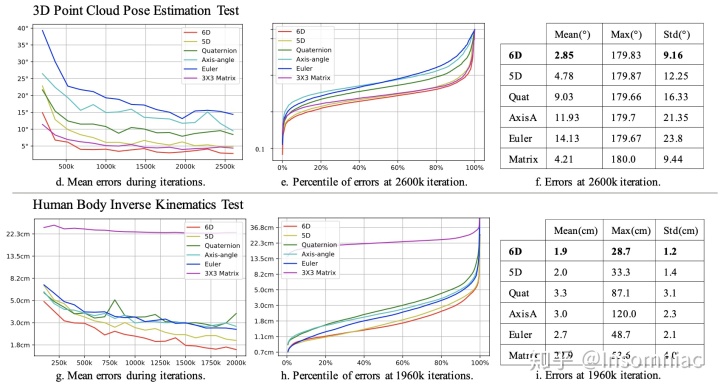
3D点云姿态估计和人体Inverse Kinematics的结果。需要注意的是,表 f 中的 Matrix 是用神经网络直接regress旋转矩阵再用 Gram-Schmidt 正交化之后的结果,而表 g 中的 Matrix 没有进行Gram-Schmidt 正交化。
论文原文:Zhou, Yi, et al. "On the continuity of rotation representations in neural networks."Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2019.
http://openaccess.thecvf.com/content_CVPR_2019/papers/Zhou_On_the_Continuity_of_Rotation_Representations_in_Neural_Networks_CVPR_2019_paper.pdfopenaccess.thecvf.com
CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)