matlab仿真参考文献,机器人运动学论文,关于基于MATLAB的PUMA机器人运动仿真相关参考文献资料-免费论文范文...
导读:这篇机器人运动学论文范文为免费优秀学术论文范文,可用于相关写作参考。(河南城建学院电气与电子工程系河南论文范文467036)摘 要:机器人运动学是机器人学的一个重要分支,是实现机器人运动控制的基础.论文以D-H坐标系理论为基础对PUMA560机器人进行了参数设计,利用MATLAB机器人工具箱,对机器人的正运动学、逆运动学、轨迹规划进行了仿真.Matlab仿真结果说明了所设计的参数的正...
导读:这篇机器人运动学论文范文为免费优秀学术论文范文,可用于相关写作参考。
(河南城建学院电气与电子工程系 河南论文范文 467036)
摘 要:机器人运动学是机器人学的一个重要分支,是实现机器人运动控制的基础.论文以D-H坐标系理论为基础对PUMA560机器人进行了参数设计,利用MATLAB机器人工具箱,对机器人的正运动学、逆运动学、轨迹规划进行了仿真.Matlab仿真结果说明了所设计的参数的正确性,能够达到预定的目标.
关键词:机器人 PUMA560 D-H坐标系 运动学 轨迹规划
中图分类号:TP24 文献标识码:A文章编号:1672-3791(2011)10(c)-0005-02
机器人运动学分析:运动爬杆机器人运动学仿真视频
机器人运动学的研究涉及大量的数学运算,计算工作相当繁锁.因此,采用一些工具软件对其分析可大大提高工作效率,增加研究的灵活性和可操作性.对机器人进行图形仿真,可以将机器人仿真的结果以图形的形式表示出来,从而直观地显示出机器人的运动情况,得到从数据曲线或数据本身难以分析出来的许多重要信息,还可以从图形上看到机器人在一定控制条件下的运动规律[1].
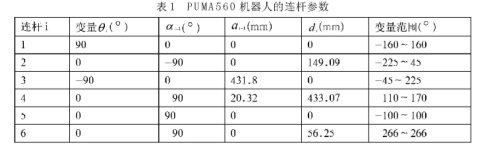
论文首先设计了PUMA560机器人的各连杆参数,然后讨论了正、逆运动学算法,轨迹规划问题,最后在MATLAB环境下,运用Robotics Toolbox,编制简单的程序语句,快速完成了机器人得运动学仿真.

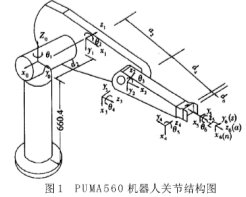
设机械手起始位置位于A点,qA等于[000000],即表示机器人的各关节都处于零位置处.机械手在B点和C点相对于基坐标系的位姿可用齐次变换矩阵TB和TC来表示.图2所示为机械手臂在A点时的三维图形.
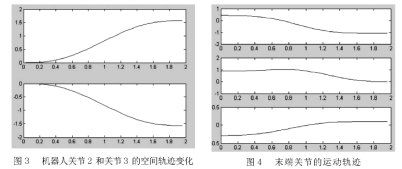
可通过matlab编程来给出机器人由A运动到B,转动关节2和转动关节3的角度随时间变换的仿真图,如图3所示.图4所示为末端关节沿x,y,z方向的运动轨迹.取仿真时间为2s,采样间隔为0.056s.从图3可以看出:在所取的仿真时间内,转动关节2由零逐渐变化到1.5708rad,转动关节3由零逐渐变化到-1.5708rad.图4说明机器人由A运动到B,末端关节沿x,y,z方向位移矢量的变化轨迹,证明机器人可以实现不同方位的姿态.通过仿真曲线可以观察到机器人从A运动到B时各关节的运动情况,且各关节运动情况均为正常,各连杆没有运动错位的情况,从而验证了所有连杆参数的合理性,且说明了各参数的设计能够实现预定的目标.
4. 结语
论文基于D-H坐标系对PUMA560机器人进行了参数设计,分析了它的运动学问题和轨迹规划问题.MATLAB仿真结果表明,只要机器人各关节角在给定范围内选择,得出的结果完全符合实际情况,说明参数设计合理,达到良好的效果.
参考文献
[1]罗家佳,胡国清.基于Matlab的机器人运动学仿真[J].厦门大学学报(自然科学版),44(5).
[2]蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[3]干民耀,马骏骑,等.基于Matlab的Puma机器人运动学仿真[J].昆明理工大学学报(理工版),28(6).
机器人运动学范文
机器人运动学分析参考文献总结:
关于对不知道怎么写机器人运动学论文范文课题研究的大学硕士、相关本科毕业论文机器人运动学论文开题报告范文和文献综述及职称论文的作为参考文献资料下载。

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)