winform 根据textbox 获取父控件名称_基于机器人三维控件快速开发机器人仿真应用(一)...
基于机器人三维控件快速开发机器人仿真应用1. 前言通过计算机对实际的机器人系统进行模拟。机器人系统仿真可以通过单机或多 台机器人组成的工作站或生产线。仿真可以通过交互式计算机图形技术和机器人学理论等,在计算机中生成机器人的几何图形,并对其进行三维显示,用来确定机器人的本体及工作环境的动态变化过程。通过系统仿真,可以在制造单机与生产线之前模拟出实物,缩短生产工期,可以避免不必要的返工。在使用的软件中
基于机器人三维控件快速开发机器人仿真应用
1. 前言
通过计算机对实际的机器人系统进行模拟。机器人系统仿真可以通过单机或多 台机器人组成的工作站或生产线。仿真可以通过交互式计算机图形技术和机器人学理论等,在计算机中生成机器人的几何图形,并对其进行三维显示,用来确定机器人的本体及工作环境的动态变化过程。通过系统仿真,可以在制造单机与生产线之前模拟出实物,缩短生产工期,可以避免不必要的返工。在使用的软件中,工作站级的仿真软件功能较全,实时性高且真实性强,可以产生近似真实的仿真画面;而微机级仿真软件随实时性和真实性不高,但具有通用性强、使用方便等优点。目前机器人系统仿真所存在的主要问题是仿真造型与实际产品之间存在误差,需要进一步的研究解决。
1.1. 机器人三维控件简介
AnyCAD Robot 三维控件提供了从几何造型、三维显示、数据管理全方位的解决方案。使用AnyCAD机器人平台可以方便快速的定制个性化的机器人仿真应用。
ARP由AnyCAD Assembly Editor(AAE)和AnyCAD Graphics Platform(AGP)组成,其中AAD用于创建机器人模型,把组成机器人的部件关键组装成可运动的机器人;AGP为个性化定制提供底层的SDK,基于AGP可以快速的搭建用户自己的机器人仿真应用程序。AGP提供C++和.Net SDK,用户即可以使用MFC/Qt开发业务界面,又可以使用WinForm/WPF开发。
2. 使用流程
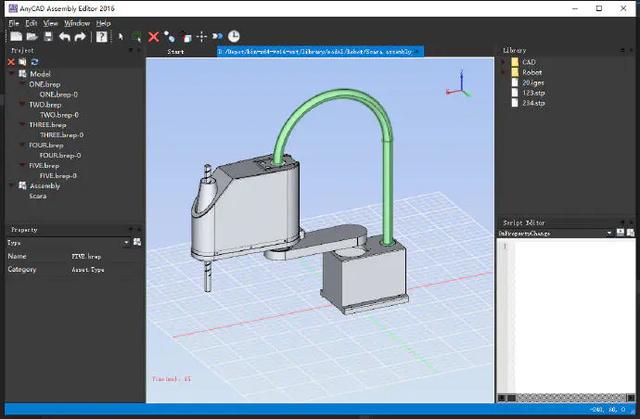
2.1 三维机器人模型组装
在AAE编辑环境中把机器人关节组装成完整的机器人,并把关节命名,保存为机器人描述文件。通过关节名称可以设置关键的位置、转向等,达到控制机器人运动的目的。
AAE支持STP,IGES,3DS,OBJ等模型格式。
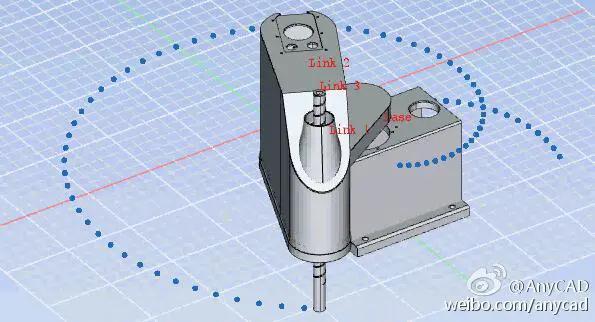
2.2 路径仿真
通过路径可视化,可以清晰的观察机器人手臂的运动轨迹
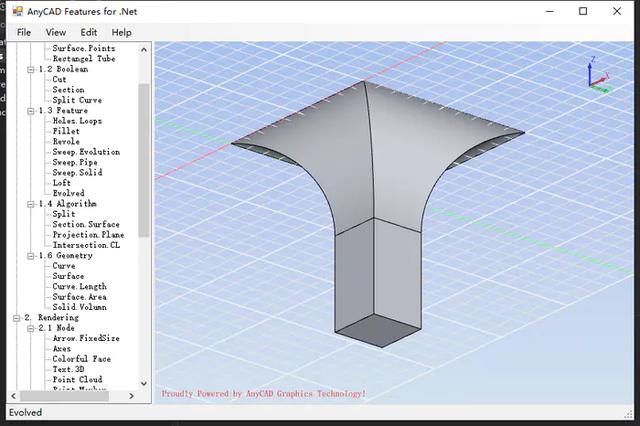
2.3 场景建模
AnyCAD三维控件支持创建基本体、拉伸、扫略、布尔运算等,详见AnyCAD SDK的功能列表。在用户的程序中可以加载或创建加工对象、运动轨迹等,结合用户自己的算法控制机器人模型。
从github上可以获取完整的示例代码: https://github.com/anycad/anycad.net.pro.AppFeatures
2.4 界面与AGP集成
AGP支持C++, .Net开发,用户根据需要选择与MFC,Qt或者WinForm/WPF集成。在用户自己的应用环境中集成ARP三维机器人环境,使用AGP提供的API加载并显示AAE生成的机器人模型,使用API控制机器人关节的位置和朝向。
与.Net集成非常简单,具体参考:https://www.cnblogs.com/anycad/p/12862554.html
3. 总结
借助AnyCAD机器人三维控件,可以非常方便的搭建机器人模拟应用,让机器人仿真开发变得简单。

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)