自动驾驶路径规划——路径规划入门须知
这个学期学校开设了相应的课程,同时也在学习古月居机器人学系列的《基于栅格地图的机器人路径规划指南》,为了巩固知识,方便自己的学习与整理,遂以学习笔记的形式记录。
目录
前言
这个学期学校开设了相应的课程,同时也在学习古月居机器人学系列的《基于栅格地图的机器人路径规划指南》,为了巩固知识,方便自己的学习与整理,遂以学习笔记的形式记录。
1.无人驾驶关键技术
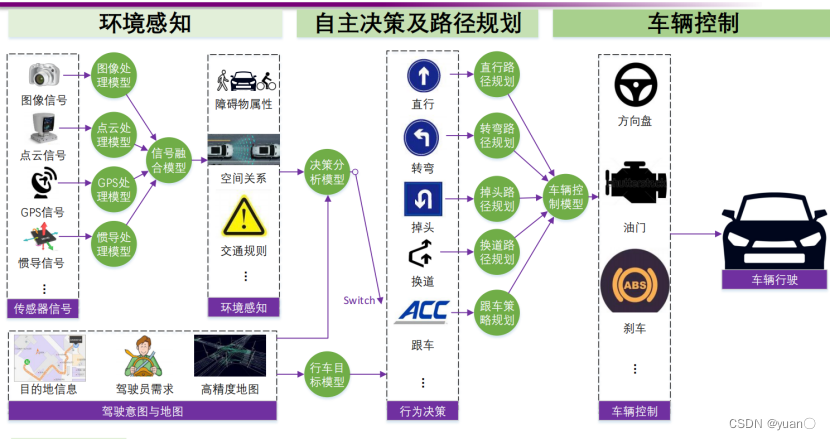
1.环境感知:激光雷达(Lidar)、雷达(Radar)、超声波、视觉相机、惯导(IMU)等
2.高精度地图(HD Map):周围环境及地形的高精度建模(10cm左右的精度)
3.控制规划及决策:对汽车进行智能控制
基于环境感知——自主决策及路径规划——车辆控制的模型框架,可以实现多行车目标下的车辆精确控制。
2.路径规划基本概念与分类
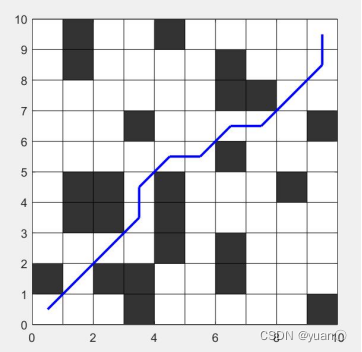
路径规划(Path Planning) 是指在具有障碍物的环境中,按照一定的评价标准,比如路径长度最短或能量消耗最少原则等,寻找一条从起始状态到目标状态的无碰撞路径。
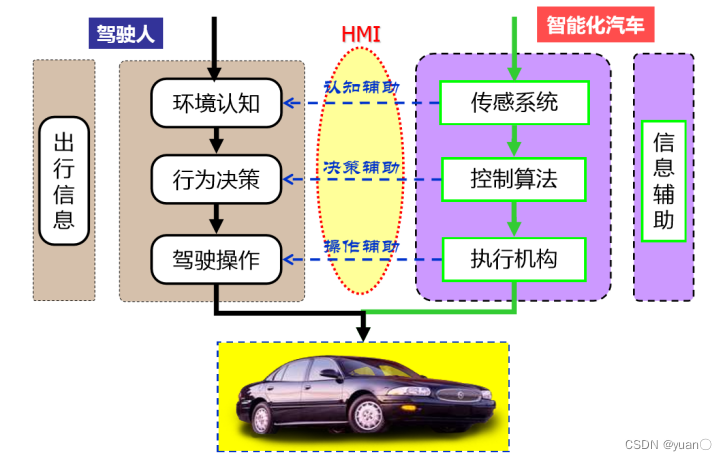
在现实生活中,驾驶员在驾驶车辆时,往往遵循以下步骤:
- 凭借自身经验或者导航地图,确定一个大致的方向(类似于全局路径规划)
- 根据周身环境,例如行人、车辆等需要避障的物体,进行判断与决策(类似于局部路径规划)
- 控制车辆进行运动
对于自动驾驶汽车而言,其过程也大致类似。首先是环境感知,主要是依托高精地图(HD Map)等确立相应的起始点和出发点,进行全局路径规划;之后再依据Lidar、Radar等感知硬件,进行局部路径规划,对周身环境作出动态反应;最后对车辆进行控制。
2.1 路径规划基本概念
完备性:是指如果在起始点和目标点间有路径解存在,那么一定可以得到解,如果得不到解那么一定说明没有解存在;
概率完备性:是指如果在起始点和目标点间有路径解存在,只要规划或搜索的时间足够长,就一定能确保找到一条路径解;
最优性:是指规划得到的路径在某个评价指标上是最优的(评价指标一般为路径的长度);
渐进最优性:是指经过有限次规划迭代后得到的路径是接近最优的次优路径,且每次迭代后都与最优路径更加接近,是一个逐渐收敛的过程。
2.1.1 路径规划需要解决的问题
1.始于起始点止于终点
2.避障
3.尽可能优化的路径
2.1.2 路径规划——现在的研究
- 轨迹优化:样条插值,多项式插值等平滑方法
- 未知环境下的路径规划
- 动态环境下的路径规划
- 三维路径规划
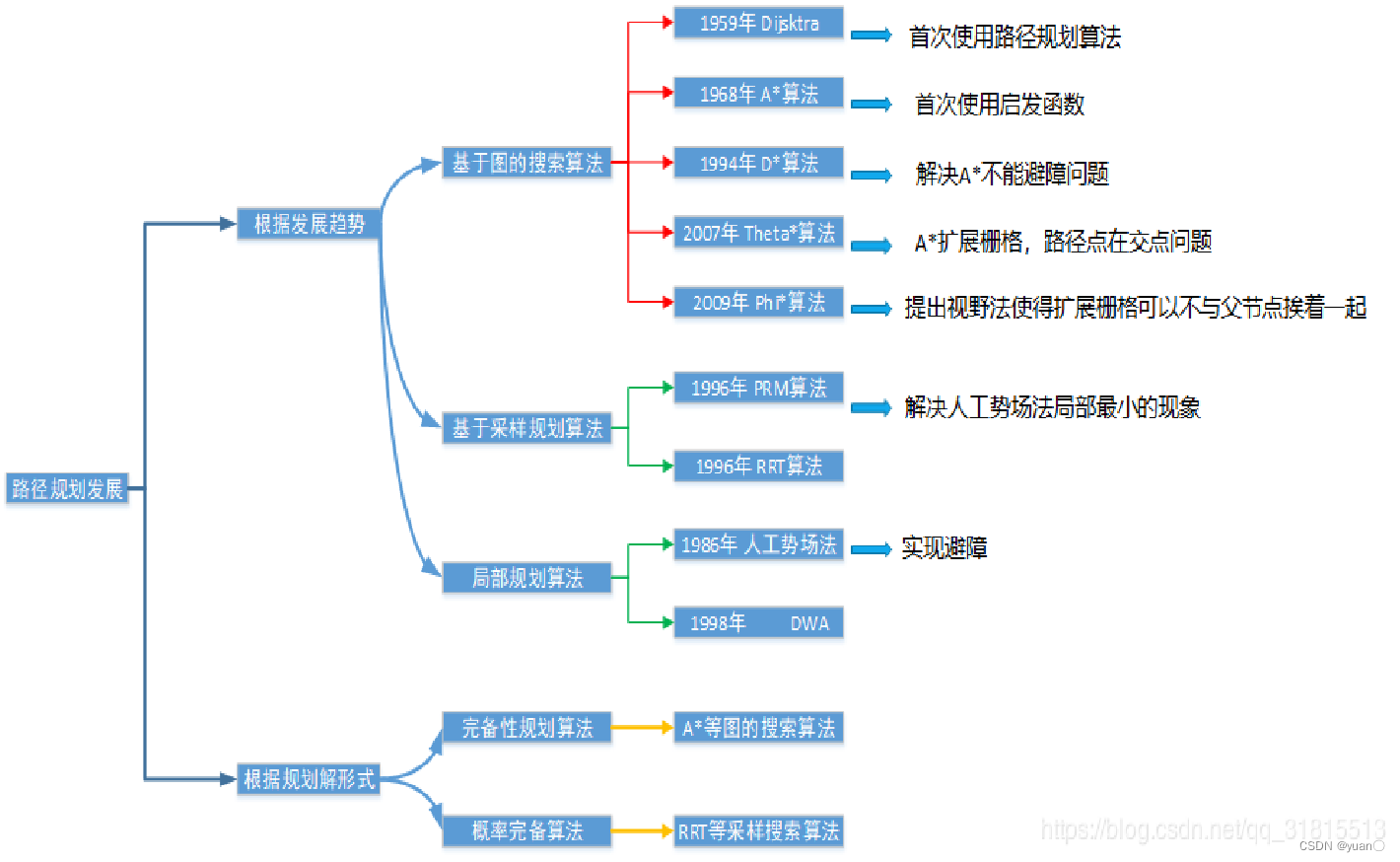
按照各种算法发现先后时序及算法基本原理,将路径规划算法大致分为四类
传统算法:模拟退火算法、人工势场法、模糊逻辑算法、禁忌搜索算法等
图形学的方法:C空间法、栅格法、自由空间法、voronoi图法等。
智能仿生学算法:蚁群算法、神经网络算法、粒子群算法、遗传算法等。
其他算法
传统算法在解决实际问题时往往存在着建模难的问题,图形学的方法则提供了建模的基本方法,但是图形学的方法普遍存在着搜索能力的不足,往往需要结合专门的搜索算法。处理复杂动态环境信息情况下的路径规划问题时,来自于自然界的启示往往能起到很好的作用。人们通过仿生学研究得到智能仿生学算法。
2.2路径规划的分类
根据对环境信息的把握程度分
- 基于先验完全信息的全局路径规划
- 基于传感器信息的局部路径规划
从获取障碍物信息是静态或是动态的角度分
- 全局路径规划属于静态规划(又称离线规划)
- 局部路径规划属于动态规划(又称在线规划)
根据所研究环境的信息特点分
- 离散域范围内的路径规划问题
- 连续域范围内的路径规划问题
2.3路径规划的流程
路径规划、环境信息与环境建模的关系
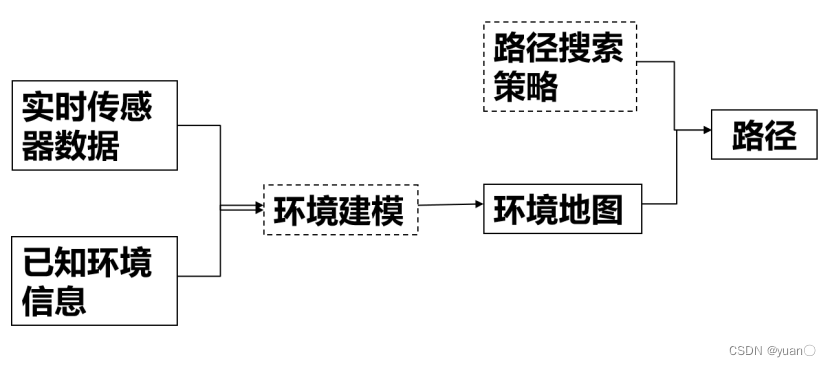
- 环境建模:建立一个便于计算机进行路径规划所使用的环境模型,即将实际的物理空间抽象成算法能够处理的抽象空间,实现相互间的映射。
- 路径搜索:路径搜索阶段是在环境模型的基础上应用相应算法寻找一条行走路径,使预定的性能函数获得最优值。
- 路径平滑:通过相应算法搜索出的路径并不一定是一条运动体可以行走的可行路径,需要作进一步处理与平滑才能使其成为一条实际可行的路径。
3.行为决策
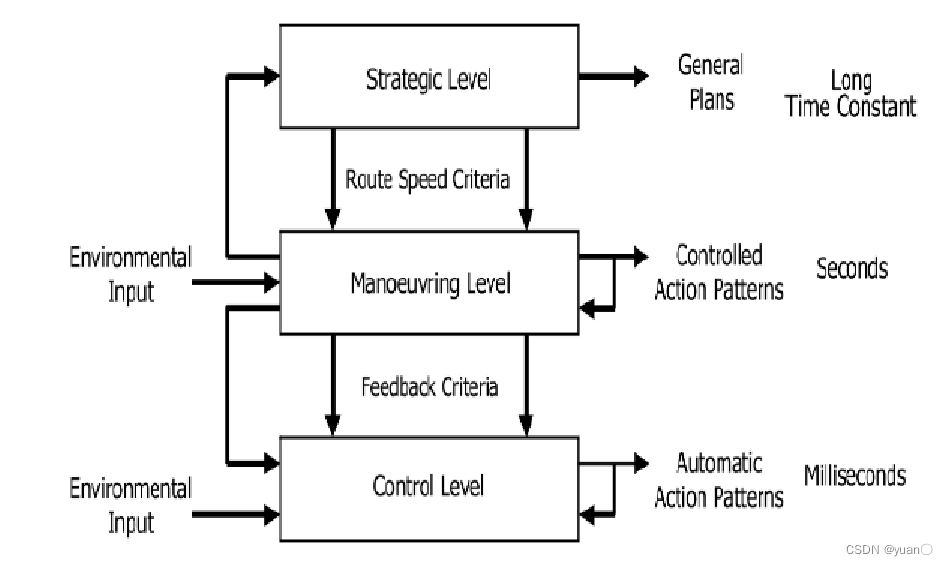
对于驾驶员在驾驶车辆的过程中的功能分解,最早可以追溯到 John A. Michon 于 1985 年 提 出 的 驾 驶 员 行 为 模 型 三 层 架 构:战略层( Strategic/Planning Level )、战术层( Tactical/Maneuvering Level )和操作层(Operational/Control Level)。从战略层到战术层再到操作层,执行所要求的时间越来越短。具体解释见自动驾驶决策——决策基本概念_yuan〇的博客-CSDN博客_自动驾驶行为决策
智能汽车当前采用的决策系统通常包含两种方法,分别为基于机理的决策控制系统和基于人工智能(端到端)的决策控制系统。
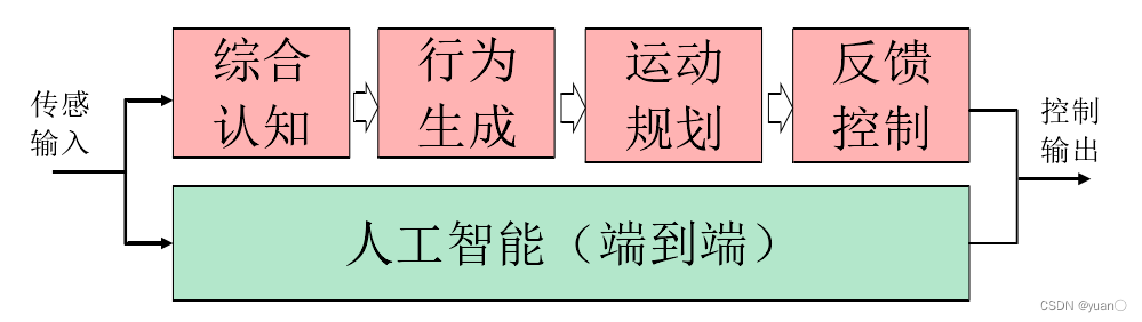
- 基于机理的决策控制模型将智能汽车的决策过程分为几个不同的部分,并对每个部分根据机理建模,实现智能汽车的决策和控制。
- 基于人工智能的算法,特别是端到端的方法,采用一个多层神经网络进行决策控制,实现从传感输入到通过神经网络直接控制输出。
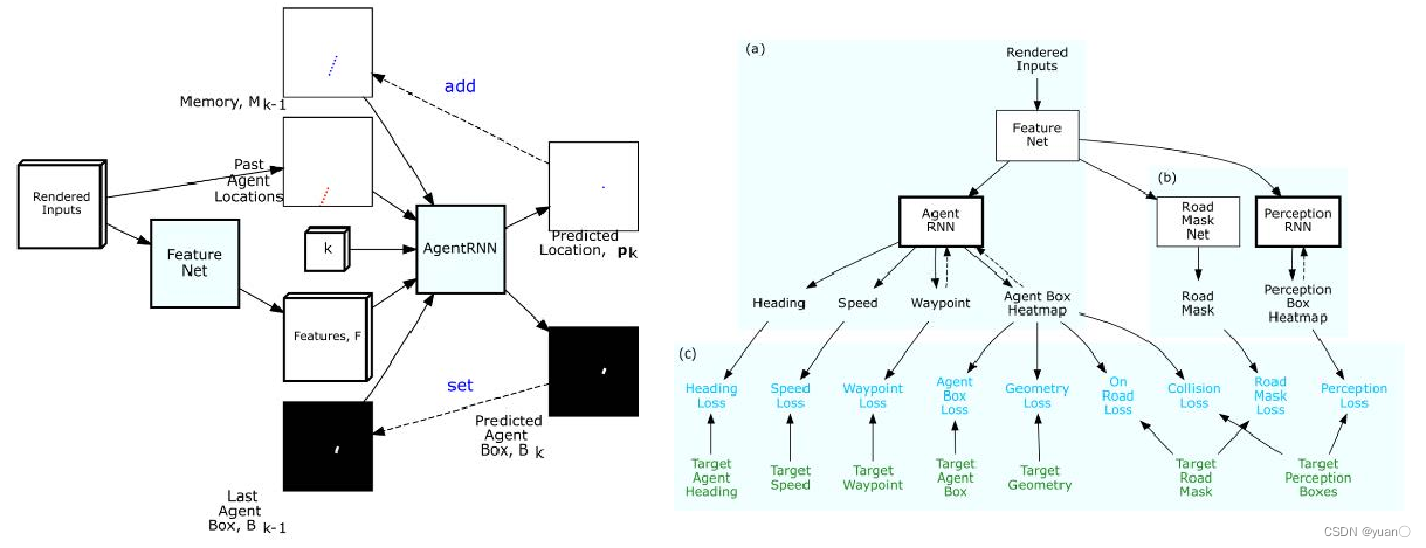
Waymo/Google 针对无人驾驶决策控制提出了 ChauffeurNet 模型,区别于“端到端”模型,Waymo 的神经网络模型输出为汽车预期的轨迹,之后通过控制模块对其进行跟踪。Waymo 为保证无人驾驶汽车能够处理复杂的交通场景,创造了一些例如发生碰撞、驶出道路等事故场景供模型学习。
-
声明
本人所有文章仅作为自己的学习记录,若有侵权,联系立删。

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)