第十九周总结(A3C、Lingo、贝塞尔)
第十九周的回顾序言python贝塞尔曲线深度强化学习A2CA3CLingo序言这一周都没有算leetcode,也没有记录博客,所有的精力都放在了论文回稿上总结一下这一周的所学python学习了很久的java,回头重新看python,发现python真的是随意的很,没有强制定义类,可以面向对象,可以面向过程贝塞尔曲线关于有序散点轨迹的拟合python神经网络贝塞尔曲线深度强化学习A2CA3CLing
序言
这一周都没有算leetcode,也没有记录博客,所有的精力都放在了论文回稿上
总结一下这一周的所学
python
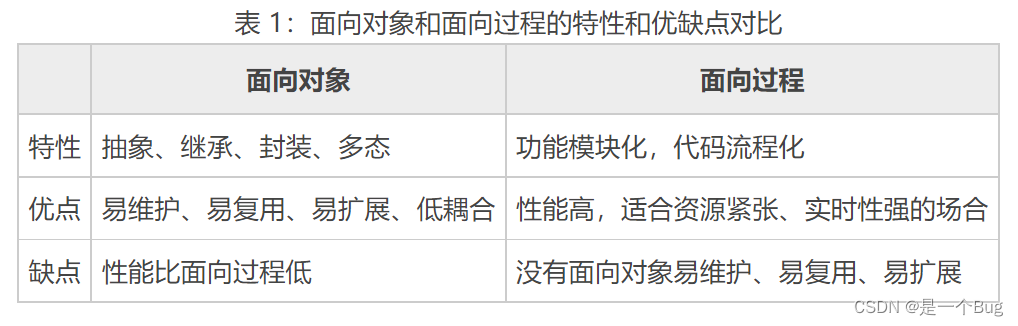
学习了很久的java,回头重新看python,发现python真的是随意的很,没有强制定义类,可以面向对象,可以面向过程
散点拟合曲线
关于有序散点轨迹的拟合
- 贝塞尔曲线是我正在用的,又快又高效,会丢失一定的信息
- 如果需要更精确的点信息,建议dp网络。
- 如果数据是有序的,建议python中的scipy
python-scipy
插值:简单来说,插值就是根据原有数据进行填充,最后生成的曲线一定过原有点。
拟合:拟合是通过原有数据,调整曲线系数,使得曲线与已知点集的差别(最小二乘)最小,最后生成的曲线不一定经过原有点。
# 这里要确定好顺序
import matplotlib.pyplot as plt
import numpy as np
from scipy import interpolate
#设置距离
x =np.array([0, 1, 1.5, 2, 2.5, 3, 3.5, 4, 4.5, 5, 5.5, 6, 6.5, 70, 8, 9,10])
#设置相似度
y =np.array([0.8579087793827057, 0.8079087793827057, 0.7679087793827057, 0.679087793827057,
0.5579087793827057, 0.4579087793827057, 0.3079087793827057, 0.3009087793827057,
0.2579087793827057, 0.2009087793827057, 0.1999087793827057, 0.1579087793827057,
0.0099087793827057, 0.0079087793827057, 0.0069087793827057, 0.0019087793827057,
0.0000087793827057])
#插值法之后的x轴值,表示从0到10间距为0.5的200个数
xnew =np.arange(0,10,0.1)
#实现函数
func = interpolate.interp1d(x,y,kind='cubic')
#利用xnew和func函数生成ynew,xnew数量等于ynew数量
ynew = func(xnew)
# 原始折线
plt.plot(x, y, "r", linewidth=1)
#平滑处理后曲线
plt.plot(xnew,ynew)
#设置x,y轴代表意思
plt.xlabel("The distance between POI and user(km)")
plt.ylabel("probability")
#设置标题
plt.title("The content similarity of different distance")
#设置x,y轴的坐标范围
plt.xlim(0,10,8)
plt.ylim(0,1)
plt.show()
神经网络
补充
贝塞尔曲线
这个是我正在用的,又快又高效,但是如果需要更精确的点信息,建议dp网络。
如果数据是有序的,建议python中的scipy
import matplotlib.pyplot as plt
import numpy as np
import math
state = np.load('S_record_REAL.npy')[155]
state = state[:,0:2]
# episode = 50
x1 = state[:,0]
y1 = state[:,1]
class Bezier:
# 输入控制点,Points是一个array,num是控制点间的插补个数
def __init__(self,Points,InterpolationNum):
self.demension=Points.shape[1] # 点的维度
self.order=Points.shape[0]-1 # 贝塞尔阶数=控制点个数-1
self.num=InterpolationNum # 相邻控制点的插补个数
self.pointsNum=Points.shape[0] # 控制点的个数
self.Points=Points
# 获取Bezeir所有插补点
def getBezierPoints(self,method):
if method==0:
return self.DigitalAlgo()
if method==1:
return self.DeCasteljauAlgo()
# 数值解法
def DigitalAlgo(self):
PB=np.zeros((self.pointsNum,self.demension)) # 求和前各项
pis =[] # 插补点
for u in np.arange(0,1+1/self.num,1/self.num):
for i in range(0,self.pointsNum):
PB[i]=(math.factorial(self.order)/(math.factorial(i)*math.factorial(self.order-i)))*(u**i)*(1-u)**(self.order-i)*self.Points[i]
pi=sum(PB).tolist() #求和得到一个插补点
pis.append(pi)
return np.array(pis)
# 德卡斯特里奥解法
def DeCasteljauAlgo(self):
pis =[] # 插补点
for u in np.arange(0,1+1/self.num,1/self.num):
Att=self.Points
for i in np.arange(0,self.order):
for j in np.arange(0,self.order-i):
Att[j]=(1.0-u)*Att[j]+u*Att[j+1]
pis.append(Att[0].tolist())
return np.array(pis)
class Line:
def __init__(self,Points,InterpolationNum):
self.demension=Points.shape[1] # 点的维数
self.segmentNum=InterpolationNum-1 # 段数
self.num=InterpolationNum # 单段插补(点)数
self.pointsNum=Points.shape[0] # 点的个数
self.Points=Points # 所有点信息
def getLinePoints(self):
# 每一段的插补点
pis=np.array(self.Points[0])
# i是当前段
for i in range(0,self.pointsNum-1):
sp=self.Points[i]
ep=self.Points[i+1]
dp=(ep-sp)/(self.segmentNum)# 当前段每个维度最小位移
for i in range(1,self.num):
pi=sp+i*dp
pis=np.vstack((pis,pi))
return pis
# points=np.array([
# ])
points= state
if points.shape[1]==3:
fig=plt.figure()
ax = fig.gca(projection='3d')
# 标记控制点
for i in range(0,points.shape[0]):
ax.scatter(points[i][0],points[i][1],points[i][2],marker='o',color='r')
ax.text(points[i][0],points[i][1],points[i][2],i,size=12)
# 直线连接控制点
l=Line(points,1000)
pl=l.getLinePoints()
ax.plot3D(pl[:,0],pl[:,1],pl[:,2],color='k')
# 贝塞尔曲线连接控制点
bz=Bezier(points,1000)
matpi=bz.getBezierPoints(0)
ax.plot3D(matpi[:,0],matpi[:,1],matpi[:,2],color='r')
plt.show()
if points.shape[1]==2:
# 标记控制点
# for i in range(0,points.shape[0]):
# plt.scatter(points[i][0],points[i][1],marker='o',color='r')
# plt.text(points[i][0],points[i][1],i,size=12)
# 直线连接控制点
l=Line(points,1000)
pl=l.getLinePoints()
# plt.plot(pl[:,0],pl[:,1],color='k')
# 贝塞尔曲线连接控制点
bz=Bezier(points,1000)
matpi=bz.getBezierPoints(1)
```plt.plot(matpi[:,0],matpi[:,1],color='r')
plt.show()
深度强化学习
A2C
i
mport multiprocessing
import threading
import tensorflow.compat.v1 as tf
import numpy as np
# from NB_NOMA import NOMA
from sea_environment_ppo import SeaOfEnv
import os
import shutil
import matplotlib.pyplot as plt
tf.disable_eager_execution()
import time
#N_WORKERS = multiprocessing.cpu_count()
N_WORKERS = 1
MAX_EP_STEP = 50
MAX_GLOBAL_EP = 1500
GLOBAL_NET_SCOPE = 'Global_Net'
UPDATE_GLOBAL_ITER = 1036
GAMMA = 0.9
ENTROPY_BETA = 0.01
LR_A = 0.0002 # learning rate for actor
LR_C = 0.0002 # learning rate for critic
GLOBAL_RUNNING_R = []
GLOBAL_EP = 0
N_S = 2
N_A = 1
A_BOUND = [-0.68, 0.66]
env = SeaOfEnv(N_S,N_A)
class ACNet(object):
def __init__(self, scope, globalAC=None):
if scope == GLOBAL_NET_SCOPE: # get global network
with tf.variable_scope(scope):
self.s = tf.placeholder(tf.float32, [None, N_S], 'S')
self.a_params, self.c_params = self._build_net(scope)[-2:]
else: # local net, calculate losses
with tf.variable_scope(scope):
self.s = tf.placeholder(tf.float32, [None, N_S], 'S')
self.a_his = tf.placeholder(tf.float32, [None, N_A], 'A')
self.v_target = tf.placeholder(tf.float32, [None, 1], 'Vtarget')
mu, sigma, self.v, self.a_params, self.c_params = self._build_net(scope)
td = tf.subtract(self.v_target, self.v, name='TD_error')
with tf.name_scope('c_loss'):
self.c_loss = tf.reduce_mean(tf.square(td))
with tf.name_scope('wrap_a_out'):
mu, sigma = mu * A_BOUND[1], sigma + 1e-4
normal_dist = tf.distributions.Normal(mu, sigma)
with tf.name_scope('a_loss'):
log_prob = normal_dist.log_prob(self.a_his)
exp_v = log_prob * tf.stop_gradient(td)
entropy = normal_dist.entropy() # encourage exploration
self.exp_v = ENTROPY_BETA * entropy + exp_v
self.a_loss = tf.reduce_mean(-self.exp_v)
with tf.name_scope('choose_a'): # use local params to choose action
self.A = tf.clip_by_value(tf.squeeze(normal_dist.sample(1), axis=[0, 1]), A_BOUND[0], A_BOUND[1])
with tf.name_scope('local_grad'):
self.a_grads = tf.gradients(self.a_loss, self.a_params)
self.c_grads = tf.gradients(self.c_loss, self.c_params)
with tf.name_scope('sync'):
with tf.name_scope('pull'):
self.pull_a_params_op = [l_p.assign(g_p) for l_p, g_p in zip(self.a_params, globalAC.a_params)]
self.pull_c_params_op = [l_p.assign(g_p) for l_p, g_p in zip(self.c_params, globalAC.c_params)]
with tf.name_scope('push'):
self.update_a_op = OPT_A.apply_gradients(zip(self.a_grads, globalAC.a_params))
self.update_c_op = OPT_C.apply_gradients(zip(self.c_grads, globalAC.c_params))
def _build_net(self, scope):
w_init = tf.random_normal_initializer(0., .1)
with tf.variable_scope('actor'):
l_a = tf.layers.dense(self.s, 128, tf.nn.relu6, kernel_initializer=w_init, name='la')
mu = tf.layers.dense(l_a, N_A, tf.nn.tanh, kernel_initializer=w_init, name='mu')
sigma = tf.layers.dense(l_a, N_A, tf.nn.softplus, kernel_initializer=w_init, name='sigma')
with tf.variable_scope('critic'):
l_c = tf.layers.dense(self.s, 64, tf.nn.relu6, kernel_initializer=w_init, name='lc')
v = tf.layers.dense(l_c, 1, kernel_initializer=w_init, name='v') # state value
a_params = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope=scope + '/actor')
c_params = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope=scope + '/critic')
return mu, sigma, v, a_params, c_params
def update_global(self, feed_dict): # run by a local
SESS.run([self.update_a_op, self.update_c_op], feed_dict) # local grads applies to global net
def pull_global(self): # run by a local
SESS.run([self.pull_a_params_op, self.pull_c_params_op])
def choose_action(self, s): # run by a local
s = s[np.newaxis, :]
return SESS.run(self.A, {self.s: s})
class Worker(object):
def __init__(self, name, globalAC):
self.env = SeaOfEnv(N_S,N_A)
self.name = name
self.AC = ACNet(name, globalAC)
def work(self):
global GLOBAL_RUNNING_R, GLOBAL_EP
total_step = 1
a3c_r = []
buffer_s, buffer_a, buffer_r = [], [], []
while not COORD.should_stop() and GLOBAL_EP < MAX_GLOBAL_EP:
s = self.env.reset()
ep_r = 0
for ep_t in range(MAX_EP_STEP):
# if self.name == 'W_0':
# self.env.render()
# s = self.env.reset()
a = self.AC.choose_action(s)
s_, r = self.env.step(a, s)
# print(s)
done = True if ep_t == MAX_EP_STEP - 1 else False
ep_r += r / MAX_EP_STEP
s = s_
total_step += 1
buffer_s.append(s)
buffer_a.append(a)
buffer_r.append(r)
# normalize
if total_step % UPDATE_GLOBAL_ITER == 0 or done: # update global and assign to local net
if done:
v_s_ = 0 # terminal
else:
v_s_ = SESS.run(self.AC.v, {self.AC.s: s_[np.newaxis, :]})[0, 0]
buffer_v_target = []
for r in buffer_r[::-1]: # reverse buffer r
v_s_ = r + GAMMA * v_s_
buffer_v_target.append(v_s_)
buffer_v_target.reverse()
buffer_s, buffer_a, buffer_v_target = np.vstack(buffer_s), np.vstack(buffer_a), np.vstack(buffer_v_target)
feed_dict = {
self.AC.s: buffer_s,
self.AC.a_his: buffer_a,
self.AC.v_target: buffer_v_target,
}
self.AC.update_global(feed_dict)
buffer_s, buffer_a, buffer_r = [], [], []
self.AC.pull_global()
if done:
if len(GLOBAL_RUNNING_R) == 0: # record running episode reward
GLOBAL_RUNNING_R.append(ep_r)
else:
GLOBAL_RUNNING_R.append(0.9 * GLOBAL_RUNNING_R[-1] + 0.1 * ep_r)
print(
# self.name,
# "Ep:", GLOBAL_EP,
# "| Ep_r: %i" % GLOBAL_RUNNING_R[-1],
"%.2f" %GLOBAL_RUNNING_R[-1]
)
GLOBAL_EP += 1
break
if __name__ == "__main__":
SESS = tf.Session()
t1 = time.time()
with tf.device("/cpu:0"):
OPT_A = tf.train.RMSPropOptimizer(LR_A, name='RMSPropA')
OPT_C = tf.train.RMSPropOptimizer(LR_C, name='RMSPropC')
GLOBAL_AC = ACNet(GLOBAL_NET_SCOPE) # we only need its params
workers = []
# Create worker
for i in range(N_WORKERS):
i_name = 'W_%i' % i # worker name
workers.append(Worker(i_name, GLOBAL_AC))
COORD = tf.train.Coordinator()
SESS.run(tf.global_variables_initializer())
worker_threads = []
for worker in workers:
job = lambda: worker.work()
t = threading.Thread(target=job)
t.start()
worker_threads.append(t)
COORD.join(worker_threads)
print('Running time: ', time.time() - t1)
np.save('ppo_r', GLOBAL_RUNNING_R)
plt.plot(np.arange(len(GLOBAL_RUNNING_R)), GLOBAL_RUNNING_R)
plt.xlabel('step')
plt.ylabel('Total moving reward')
plt.show()
A3C
import multiprocessing
import threading
import tensorflow.compat.v1 as tf
import numpy as np
# from NB_NOMA import NOMA
from sea_environment_ppo import SeaOfEnv
import os
import shutil
import matplotlib.pyplot as plt
tf.disable_eager_execution()
import time
#N_WORKERS = multiprocessing.cpu_count()
N_WORKERS = 8
MAX_EP_STEP = 50
MAX_GLOBAL_EP = 1500
GLOBAL_NET_SCOPE = 'Global_Net'
UPDATE_GLOBAL_ITER = 1036
GAMMA = 0.9
ENTROPY_BETA = 0.01
LR_A = 0.0002 # learning rate for actor
LR_C = 0.0002 # learning rate for critic
GLOBAL_RUNNING_R = []
GLOBAL_EP = 0
N_S = 2
N_A = 1
A_BOUND = [-0.68, 0.66]
env = SeaOfEnv(N_S,N_A)
class ACNet(object):
def __init__(self, scope, globalAC=None):
if scope == GLOBAL_NET_SCOPE: # get global network
with tf.variable_scope(scope):
self.s = tf.placeholder(tf.float32, [None, N_S], 'S')
self.a_params, self.c_params = self._build_net(scope)[-2:]
else: # local net, calculate losses
with tf.variable_scope(scope):
self.s = tf.placeholder(tf.float32, [None, N_S], 'S')
self.a_his = tf.placeholder(tf.float32, [None, N_A], 'A')
self.v_target = tf.placeholder(tf.float32, [None, 1], 'Vtarget')
mu, sigma, self.v, self.a_params, self.c_params = self._build_net(scope)
td = tf.subtract(self.v_target, self.v, name='TD_error')
with tf.name_scope('c_loss'):
self.c_loss = tf.reduce_mean(tf.square(td))
with tf.name_scope('wrap_a_out'):
mu, sigma = mu * A_BOUND[1], sigma + 1e-4
normal_dist = tf.distributions.Normal(mu, sigma)
with tf.name_scope('a_loss'):
log_prob = normal_dist.log_prob(self.a_his)
exp_v = log_prob * tf.stop_gradient(td)
entropy = normal_dist.entropy() # encourage exploration
self.exp_v = ENTROPY_BETA * entropy + exp_v
self.a_loss = tf.reduce_mean(-self.exp_v)
with tf.name_scope('choose_a'): # use local params to choose action
self.A = tf.clip_by_value(tf.squeeze(normal_dist.sample(1), axis=[0, 1]), A_BOUND[0], A_BOUND[1])
with tf.name_scope('local_grad'):
self.a_grads = tf.gradients(self.a_loss, self.a_params)
self.c_grads = tf.gradients(self.c_loss, self.c_params)
with tf.name_scope('sync'):
with tf.name_scope('pull'):
self.pull_a_params_op = [l_p.assign(g_p) for l_p, g_p in zip(self.a_params, globalAC.a_params)]
self.pull_c_params_op = [l_p.assign(g_p) for l_p, g_p in zip(self.c_params, globalAC.c_params)]
with tf.name_scope('push'):
self.update_a_op = OPT_A.apply_gradients(zip(self.a_grads, globalAC.a_params))
self.update_c_op = OPT_C.apply_gradients(zip(self.c_grads, globalAC.c_params))
def _build_net(self, scope):
w_init = tf.random_normal_initializer(0., .1)
with tf.variable_scope('actor'):
l_a = tf.layers.dense(self.s, 128, tf.nn.relu6, kernel_initializer=w_init, name='la')
mu = tf.layers.dense(l_a, N_A, tf.nn.tanh, kernel_initializer=w_init, name='mu')
sigma = tf.layers.dense(l_a, N_A, tf.nn.softplus, kernel_initializer=w_init, name='sigma')
with tf.variable_scope('critic'):
l_c = tf.layers.dense(self.s, 64, tf.nn.relu6, kernel_initializer=w_init, name='lc')
v = tf.layers.dense(l_c, 1, kernel_initializer=w_init, name='v') # state value
a_params = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope=scope + '/actor')
c_params = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope=scope + '/critic')
return mu, sigma, v, a_params, c_params
def update_global(self, feed_dict): # run by a local
SESS.run([self.update_a_op, self.update_c_op], feed_dict) # local grads applies to global net
def pull_global(self): # run by a local
SESS.run([self.pull_a_params_op, self.pull_c_params_op])
def choose_action(self, s): # run by a local
s = s[np.newaxis, :]
return SESS.run(self.A, {self.s: s})
class Worker(object):
def __init__(self, name, globalAC):
self.env = SeaOfEnv(N_S,N_A)
self.name = name
self.AC = ACNet(name, globalAC)
def work(self):
global GLOBAL_RUNNING_R, GLOBAL_EP
total_step = 1
a3c_r = []
buffer_s, buffer_a, buffer_r = [], [], []
while not COORD.should_stop() and GLOBAL_EP < MAX_GLOBAL_EP:
s = self.env.reset()
ep_r = 0
for ep_t in range(MAX_EP_STEP):
# if self.name == 'W_0':
# self.env.render()
# s = self.env.reset()
a = self.AC.choose_action(s)
s_, r = self.env.step(a, s)
# print(s)
done = True if ep_t == MAX_EP_STEP - 1 else False
ep_r += r / MAX_EP_STEP
s = s_
total_step += 1
buffer_s.append(s)
buffer_a.append(a)
buffer_r.append(r)
# normalize
if total_step % UPDATE_GLOBAL_ITER == 0 or done: # update global and assign to local net
if done:
v_s_ = 0 # terminal
else:
v_s_ = SESS.run(self.AC.v, {self.AC.s: s_[np.newaxis, :]})[0, 0]
buffer_v_target = []
for r in buffer_r[::-1]: # reverse buffer r
v_s_ = r + GAMMA * v_s_
buffer_v_target.append(v_s_)
buffer_v_target.reverse()
buffer_s, buffer_a, buffer_v_target = np.vstack(buffer_s), np.vstack(buffer_a), np.vstack(buffer_v_target)
feed_dict = {
self.AC.s: buffer_s,
self.AC.a_his: buffer_a,
self.AC.v_target: buffer_v_target,
}
self.AC.update_global(feed_dict)
buffer_s, buffer_a, buffer_r = [], [], []
self.AC.pull_global()
if done:
if len(GLOBAL_RUNNING_R) == 0: # record running episode reward
GLOBAL_RUNNING_R.append(ep_r)
else:
GLOBAL_RUNNING_R.append(0.9 * GLOBAL_RUNNING_R[-1] + 0.1 * ep_r)
print(
# self.name,
# "Ep:", GLOBAL_EP,
# "| Ep_r: %i" % GLOBAL_RUNNING_R[-1],
"%.2f" %GLOBAL_RUNNING_R[-1]
)
GLOBAL_EP += 1
break
if __name__ == "__main__":
SESS = tf.Session()
t1 = time.time()
with tf.device("/cpu:0"):
OPT_A = tf.train.RMSPropOptimizer(LR_A, name='RMSPropA')
OPT_C = tf.train.RMSPropOptimizer(LR_C, name='RMSPropC')
GLOBAL_AC = ACNet(GLOBAL_NET_SCOPE) # we only need its params
workers = []
# Create worker
for i in range(N_WORKERS):
i_name = 'W_%i' % i # worker name
workers.append(Worker(i_name, GLOBAL_AC))
COORD = tf.train.Coordinator()
SESS.run(tf.global_variables_initializer())
worker_threads = []
for worker in workers:
job = lambda: worker.work()
t = threading.Thread(target=job)
t.start()
worker_threads.append(t)
COORD.join(worker_threads)
print('Running time: ', time.time() - t1)
np.save('ppo_r', GLOBAL_RUNNING_R)
plt.plot(np.arange(len(GLOBAL_RUNNING_R)), GLOBAL_RUNNING_R)
plt.xlabel('step')
plt.ylabel('Total moving reward')
plt.show()
PPO
import tensorflow._api.v2.compat.v1 as tf
import numpy as np
import matplotlib.pyplot as plt
from sea_environment_ppo import SeaOfEnv
# from NB_FDMA_4 import FDMA
# from NB_TDMA_4 import TDMA
import os
import time
tf.reset_default_graph()
os.environ["KMP_DUPLICATE_LIB_OK"]="TRUE"
tf.disable_eager_execution()
EP_MAX = 1500
EP_LEN = 50
GAMMA = 0.9
A_LR = 0.001
C_LR = 0.008
BATCH = 64
A_UPDATE_STEPS = 10
C_UPDATE_STEPS = 10
S_DIM = 2
A_DIM = 1
# s = [e_d1, e_d2, e_d3, q_d1, q_d2, q_d3, e_r, e_d4, q_d4]
# a = [p_d1, p_d2, p_d3, alpha_d1, alpha_d2. alpha_d3, tau_t, SIC, p_d4, alpha_d4]
METHOD = [
dict(name='kl_pen', kl_target=0.01, lam=0.5),
dict(name='clip', epsilon=0.2),
][1]
class PPO(object):
def __init__(self):
self.sess = tf.Session()
self.tfs = tf.placeholder(tf.float32, [None, S_DIM], 'state')
# critic
with tf.variable_scope('critic'):
l1 = tf.layers.dense(self.tfs, 128, tf.nn.tanh)
self.v = tf.layers.dense(l1, 1)
self.tfdc_r = tf.placeholder(tf.float32, [None, 1], 'discounted_r')
self.advantage = self.tfdc_r - self.v
self.closs = tf.reduce_mean(tf.square(self.advantage))
self.ctrain_op = tf.train.AdamOptimizer(C_LR).minimize(self.closs)
# actor
pi, pi_params = self._build_anet('pi', trainable=True)
oldpi, oldpi_params = self._build_anet('oldpi', trainable=False)
with tf.variable_scope('sample_action'):
self.sample_op = tf.squeeze(pi.sample(1), axis=0)
with tf.variable_scope('update_oldpi'):
self.update_oldpi_op = [oldp.assign(p) for p, oldp in zip(pi_params, oldpi_params)]
self.tfa = tf.placeholder(tf.float32, [None, A_DIM], 'action')
self.tfadv = tf.placeholder(tf.float32, [None, 1], 'advantage')
with tf.variable_scope('loss'):
with tf.variable_scope('surrogate'):
ratio = pi.prob(self.tfa) / (oldpi.prob(self.tfa) + 1e-5)
surr = ratio * self.tfadv
if METHOD['name'] == 'kl_pen':
self.tflam = tf.placeholder(tf.float32, None, 'lambda')
kl = tf.distributions.kl_divergence(oldpi, pi)
self.kl_mean = tf.reduce_mean(kl)
self.aloss = -(tf.reduce_mean(surr - self.tflam * kl))
else:
self.aloss = -tf.reduce_mean(tf.minimum(
surr,
tf.clip_by_value(ratio, 1.-METHOD['epsilon'], 1.+METHOD['epsilon'])*self.tfadv))
with tf.variable_scope('atrain'):
self.atrain_op = tf.train.AdamOptimizer(A_LR).minimize(self.aloss)
tf.summary.FileWriter("log/", self.sess.graph)
self.sess.run(tf.global_variables_initializer())
def update(self, s, a, r):
self.sess.run(self.update_oldpi_op)
adv = self.sess.run(self.advantage, {self.tfs: s, self.tfdc_r: r})
# update actor
if METHOD['name'] == 'kl_pen':
for _ in range(A_UPDATE_STEPS):
_, kl = self.sess.run(
[self.atrain_op, self.kl_mean],
{self.tfs: s, self.tfa: a, self.tfadv: adv, self.tflam: METHOD['lam']})
if kl > 4*METHOD['kl_target']:
break
if kl < METHOD['kl_target'] / 1.5:
METHOD['lam'] /= 2
elif kl > METHOD['kl_target'] * 1.5:
METHOD['lam'] *= 2
METHOD['lam'] = np.clip(METHOD['lam'], 1e-4, 10)
else:
[self.sess.run(self.atrain_op, {self.tfs: s, self.tfa: a, self.tfadv: adv}) for _ in range(A_UPDATE_STEPS)]
# update critic
[self.sess.run(self.ctrain_op, {self.tfs: s, self.tfdc_r: r}) for _ in range(C_UPDATE_STEPS)]
def _build_anet(self, name, trainable):
with tf.variable_scope(name):
l1 = tf.layers.dense(self.tfs, 64, tf.nn.tanh, trainable=trainable)
mu = 2 * tf.layers.dense(l1, A_DIM, tf.nn.relu, trainable=trainable)
sigma = tf.layers.dense(l1, A_DIM, tf.nn.softplus, trainable=trainable)
norm_dist = tf.distributions.Normal(loc=mu, scale=sigma)
params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope=name)
return norm_dist, params
def choose_action(self, s):
s = s[np.newaxis, :]
a = self.sess.run(self.sample_op, {self.tfs: s})[0]
return np.clip(a, -0.68, 0.66)
def get_v(self, s):
if s.ndim < 2: s = s[np.newaxis, :]
return self.sess.run(self.v, {self.tfs: s})[0, 0]
env = SeaOfEnv(S_DIM,A_DIM)
# env = TDMA()
# env = FDMA()
ppo = PPO()
all_ep_r = []
throughput = []
S_Record = np.zeros((EP_MAX, EP_LEN, 2))
start = time.time()
for ep in range(EP_MAX):
s = env.reset()
buffer_s, buffer_a, buffer_r = [], [], []
ep_r = 0
for t in range(EP_LEN):
a = ppo.choose_action(s)
s_, r = env.step(a, s)
s = s_
buffer_s.append(s)
buffer_a.append(a)
# print(a)
buffer_r.append(r)
S_Record[ep][t][0] = s[0]
S_Record[ep][t][1] = s[1]
if (s_[0]>2000 or s[0]<0 or s[1]>2000 or s[1]<0 ):
break
ep_r += r
# throughput_ += B / EP_LEN
# update ppo
if (t+1) % BATCH == 0 or t == EP_LEN-1:
v_s_ = ppo.get_v(s_)
discounted_r = []
for r in buffer_r[::-1]:
v_s_ = r + GAMMA * v_s_
discounted_r.append(v_s_)
discounted_r.reverse()
bs, ba, br = np.vstack(buffer_s), np.vstack(buffer_a), np.array(discounted_r)[:, np.newaxis]
buffer_s, buffer_a, buffer_r = [], [], []
ppo.update(bs, ba, br)
# if ep == 0: all_ep_r.append(ep_r)
# else: all_ep_r.append(all_ep_r[-1]*0.9 + ep_r*0.1)
all_ep_r.append(ep_r/EP_LEN)
np.save('ppo_r', all_ep_r)
np.save('S_record_REAL', S_Record)
print(
'Ep: %i' % ep,
#"|Ep_r: %.2f" % ep_r,
"PF: %.2f" % (ep_r/50),
#("|Lam: %.4f" % METHOD['lam']) if METHOD['name'] == 'kl_pen' else '',
)
end = time.time()
print("PPO循环运行时间:%.2f秒"%(end-start))
print("maxPF: %.2f" %max(all_ep_r))
# print("maxTP: %.2f" %max(throughput))
plt.plot(np.arange(len(all_ep_r)), all_ep_r)
plt.xlabel('Episode')
plt.ylabel('Moving averaged proportional fairness')
plt.show()
DDPG
import tensorflow._api.v2.compat.v1 as tf
import numpy as np
from scipy import io
import time
from NOMA_V1 import NOMA1
import matplotlib.pyplot as plt
tf.disable_eager_execution()
np.random.seed(1)
tf.set_random_seed(1)
##################### hyper parameters ####################
MAX_EPISODES = 400
MAX_EP_STEPS = 200
LR_A = 0.0002 # learning rate for actor
LR_C = 0.0008 # learning rate for critic
GAMMA = 0.9 # reward discount
REPLACEMENT = [
dict(name='soft', tau=0.01),
dict(name='hard', rep_iter_a=600, rep_iter_c=500)
][1] # you can try different target replacement strategies
MEMORY_CAPACITY = 10000
BATCH_SIZE = 64
RENDER = False
OUTPUT_GRAPH = True
ENV_NAME = 'Pendulum-v0'
############################### Actor ####################################
class Actor(object):
def __init__(self, sess, action_dim, action_bound, learning_rate, replacement):
self.sess = sess
self.a_dim = action_dim
self.action_bound = action_bound
self.lr = learning_rate
self.replacement = replacement
self.t_replace_counter = 0
with tf.variable_scope('Actor'):
# input s, output a
self.a = self._build_net(S, scope='eval_net', trainable=True)
# input s_, output a, get a_ for critic
self.a_ = self._build_net(S_, scope='target_net', trainable=False)
self.e_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='Actor/eval_net')
self.t_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='Actor/target_net')
if self.replacement['name'] == 'hard':
self.t_replace_counter = 0
self.hard_replace = [tf.assign(t, e) for t, e in zip(self.t_params, self.e_params)]
else:
self.soft_replace = [tf.assign(t, (1 - self.replacement['tau']) * t + self.replacement['tau'] * e)
for t, e in zip(self.t_params, self.e_params)]
def _build_net(self, s, scope, trainable):
with tf.variable_scope(scope):
init_w = tf.random_normal_initializer(0., 0.3)
init_b = tf.constant_initializer(0.1)
net = tf.layers.dense(s, 30, activation=tf.nn.relu,
kernel_initializer=init_w, bias_initializer=init_b, name='l1',
trainable=trainable)
with tf.variable_scope('a'):
actions = tf.layers.dense(net, self.a_dim, activation=tf.nn.tanh, kernel_initializer=init_w,
bias_initializer=init_b, name='a', trainable=trainable)
scaled_a = tf.multiply(actions, self.action_bound,
name='scaled_a') # Scale output to -action_bound to action_bound
return scaled_a
def learn(self, s): # batch update
self.sess.run(self.train_op, feed_dict={S: s})
if self.replacement['name'] == 'soft':
self.sess.run(self.soft_replace)
else:
if self.t_replace_counter % self.replacement['rep_iter_a'] == 0:
self.sess.run(self.hard_replace)
self.t_replace_counter += 1
def choose_action(self, s):
s = s[np.newaxis, :] # single state
return self.sess.run(self.a, feed_dict={S: s})[0] # single action
def add_grad_to_graph(self, a_grads):
with tf.variable_scope('policy_grads'):
# ys = policy;
# xs = policy's parameters;
# a_grads = the gradients of the policy to get more Q
# tf.gradients will calculate dys/dxs with a initial gradients for ys, so this is dq/da * da/dparams
self.policy_grads = tf.gradients(ys=self.a, xs=self.e_params, grad_ys=a_grads)
with tf.variable_scope('A_train'):
opt = tf.train.AdamOptimizer(-self.lr) # (- learning rate) for ascent policy
self.train_op = opt.apply_gradients(zip(self.policy_grads, self.e_params))
############################### Critic ####################################
class Critic(object):
def __init__(self, sess, state_dim, action_dim, learning_rate, gamma, replacement, a, a_):
self.sess = sess
self.s_dim = state_dim
self.a_dim = action_dim
self.lr = learning_rate
self.gamma = gamma
self.replacement = replacement
with tf.variable_scope('Critic'):
# Input (s, a), output q
self.a = tf.stop_gradient(a) # stop critic update flows to actor
self.q = self._build_net(S, self.a, 'eval_net', trainable=True)
# Input (s_, a_), output q_ for q_target
self.q_ = self._build_net(S_, a_, 'target_net',
trainable=False) # target_q is based on a_ from Actor's target_net
self.e_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='Critic/eval_net')
self.t_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='Critic/target_net')
with tf.variable_scope('target_q'):
self.target_q = R + self.gamma * self.q_
with tf.variable_scope('TD_error'):
self.loss = tf.reduce_mean(tf.squared_difference(self.target_q, self.q))
with tf.variable_scope('C_train'):
self.train_op = tf.train.AdamOptimizer(self.lr).minimize(self.loss)
with tf.variable_scope('a_grad'):
self.a_grads = tf.gradients(self.q, self.a)[0] # tensor of gradients of each sample (None, a_dim)
if self.replacement['name'] == 'hard':
self.t_replace_counter = 0
self.hard_replacement = [tf.assign(t, e) for t, e in zip(self.t_params, self.e_params)]
else:
self.soft_replacement = [tf.assign(t, (1 - self.replacement['tau']) * t + self.replacement['tau'] * e)
for t, e in zip(self.t_params, self.e_params)]
def _build_net(self, s, a, scope, trainable):
with tf.variable_scope(scope):
init_w = tf.random_normal_initializer(0., 0.1)
init_b = tf.constant_initializer(0.1)
with tf.variable_scope('l1'):
n_l1 = 30
w1_s = tf.get_variable('w1_s', [self.s_dim, n_l1], initializer=init_w, trainable=trainable)
w1_a = tf.get_variable('w1_a', [self.a_dim, n_l1], initializer=init_w, trainable=trainable)
b1 = tf.get_variable('b1', [1, n_l1], initializer=init_b, trainable=trainable)
net = tf.nn.relu(tf.matmul(s, w1_s) + tf.matmul(a, w1_a) + b1)
with tf.variable_scope('q'):
q = tf.layers.dense(net, 1, kernel_initializer=init_w, bias_initializer=init_b,
trainable=trainable) # Q(s,a)
return q
def learn(self, s, a, r, s_):
self.sess.run(self.train_op, feed_dict={S: s, self.a: a, R: r, S_: s_})
if self.replacement['name'] == 'soft':
self.sess.run(self.soft_replacement)
else:
if self.t_replace_counter % self.replacement['rep_iter_c'] == 0:
self.sess.run(self.hard_replacement)
self.t_replace_counter += 1
##################### Memory ####################
class Memory(object):
def __init__(self, capacity, dims):
self.capacity = capacity
self.data = np.zeros((capacity, dims))
self.pointer = 0
def store_transition(self, s, a, r, s_):
transition = np.hstack((s, a, [r], s_))
index = self.pointer % self.capacity # replace the old memory with new memory
self.data[index, :] = transition
self.pointer += 1
def sample(self, n):
assert self.pointer >= self.capacity, 'Memory has not been fulfilled'
indices = np.random.choice(self.capacity, size=n)
return self.data[indices, :]
env = NOMA1()
state_dim = 3
action_dim = 7
action_bound = [2, 2, 2,2,2,2,2]
# all placeholder for tf
with tf.name_scope('S'):
S = tf.placeholder(tf.float32, shape=[None, state_dim], name='s')
with tf.name_scope('R'):
R = tf.placeholder(tf.float32, [None, 1], name='r')
with tf.name_scope('S_'):
S_ = tf.placeholder(tf.float32, shape=[None, state_dim], name='s_')
sess = tf.Session()
# Create actor and critic.
# They are actually connected to each other, details can be seen in tensorboard or in this picture:
actor = Actor(sess, action_dim, action_bound, LR_A, REPLACEMENT)
critic = Critic(sess, state_dim, action_dim, LR_C, GAMMA, REPLACEMENT, actor.a, actor.a_)
actor.add_grad_to_graph(critic.a_grads)
sess.run(tf.global_variables_initializer())
M = Memory(MEMORY_CAPACITY, dims=2 * state_dim + action_dim + 1)
# if OUTPUT_GRAPH:
# tf.summary.FileWriter("logs/", sess.graph)
var = 3 # control exploration
all_ep_r = []
t1 = time.time()
for i in range(MAX_EPISODES):
s = env.reset()
ep_reward = 0
for j in range(MAX_EP_STEPS):
s = env.reset()
# Add exploration noise
a = actor.choose_action(s)
a = np.clip(np.random.normal(a, var), -2, 2) # add randomness to action selection for exploration
s_, r, rate1, rate2, rate3, sec1, sec2, sec3 = env.step(a, s)
M.store_transition(s, a, r / 10, s_)
if M.pointer > MEMORY_CAPACITY:
var *= .9995 # decay the action randomness
b_M = M.sample(BATCH_SIZE)
b_s = b_M[:, :state_dim]
b_a = b_M[:, state_dim: state_dim + action_dim]
b_r = b_M[:, -state_dim - 1: -state_dim]
b_s_ = b_M[:, -state_dim:]
critic.learn(b_s, b_a, b_r, b_s_)
actor.learn(b_s)
s = s_
ep_reward += r / MAX_EP_STEPS
if j == MAX_EP_STEPS - 1:
# print('Episode:', i, ' Reward: %i' % int(ep_reward), 'Explore: %.2f' % var, )
print("%.2f" % ep_reward)
if ep_reward > -300:
RENDER = True
break
if i == 0:
all_ep_r.append(ep_reward)
else:
all_ep_r.append(all_ep_r[-1] * 0.9 + ep_reward * 0.1)
print(a)
print('辅助用户传输速率为:%0.2f ,%0.2f ,%0.2f ' %(rate1, rate2, rate3))
print('传输用户安全速率为:%0.2f ,%0.2f ,%0.2f ' %(sec1, sec2, sec3))
print('Running time: ', time.time() - t1)
plt.plot(np.arange(len(all_ep_r)), all_ep_r)
plt.xlabel('Episode')
plt.ylabel('Moving averaged proportional fairness')
plt.show()
io.savemat('./matfile/dpg3.mat', {"reword": all_ep_r})
Lingo
LINGO全称是Linear Interactive and General Optimizer的缩写—交互式的线性和通用优化求解器。它是一套设计用来帮助您快速,方便和有效的构建和求解线性,非线性,和整数最优化模型的功能全面的工具。包括功能强大的建模语言,建立和编辑问题的全功能环境,读取和写入Excel和数据库的功能,和一系列完全内置的求解程序.
Lingo 是使建立和求解线性、非线性和整数最佳化模型更快更简单更有效率的综合工具。Lingo 提供强大的语言和快速的求解引擎来阐述和求解最佳化模型。
Lingo求解TSP问题
matlab与lingo对比
这个没法比较,因为两者的定位不同.就像我们无法比较word和excel那个好用一样.一般是按需选择,交叉使用的关系.lingo是专门处理优化问题的软件,比matlab自带的优化工具箱强大,但功能单一,无法处理别的问题.matlab是综合类的工程数学软件,利用其语言和自带命令可以方便地编写处理各种问题的程序包,自带的工具箱涵盖的范围也很丰富.两者的关系可以说一个是小而精,一个是大而全.

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)